

Satellite attitude control Ground full physical simulation intelligent control system
A satellite attitude control and intelligent control system technology, applied in the field of measurement, can solve the stability adjustment of the aircraft attitude control ground simulation system, does not involve the debugging and analysis of the air bearing platform, etc., achieves low transformation cost, easy maintenance, and simple principle Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
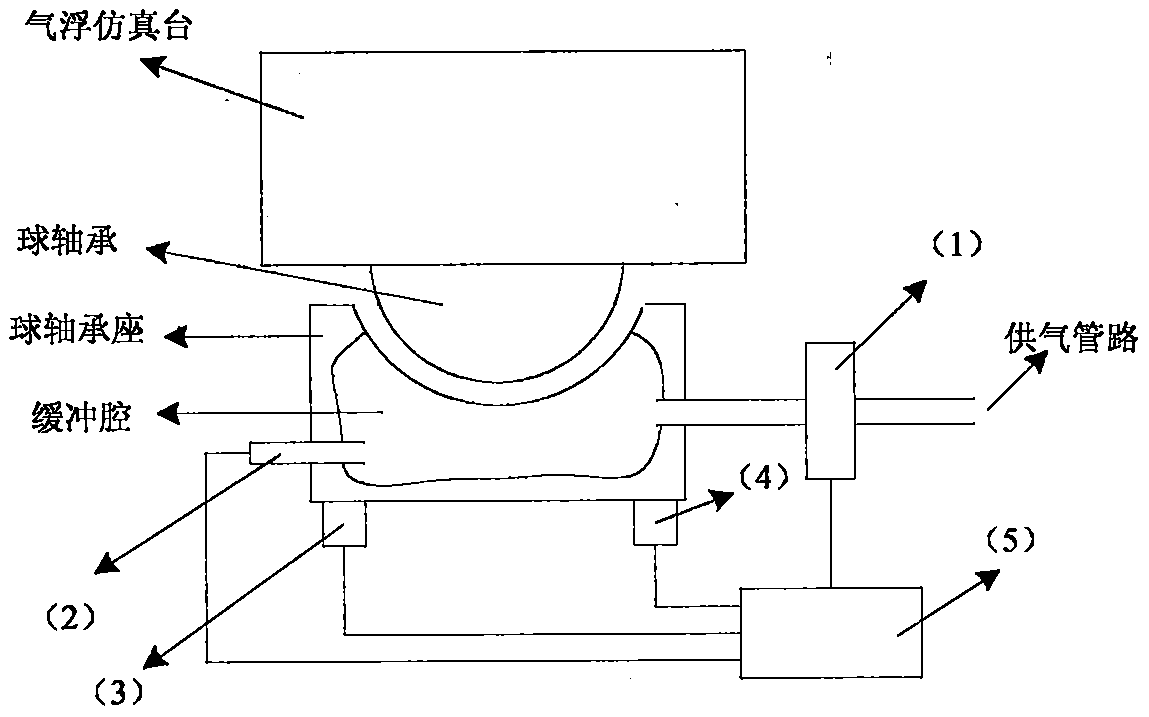
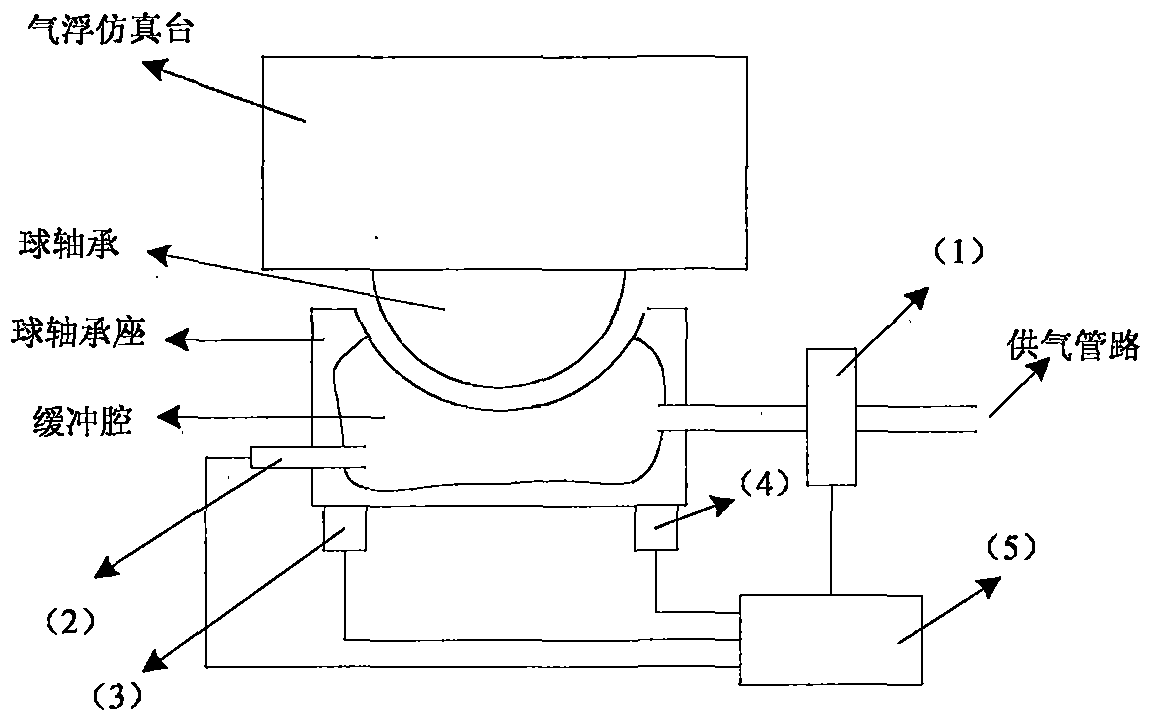
[0042] combine figure 1 , a satellite attitude control ground full physical simulation intelligent control system, comprising a pressure regulating valve 1, a pressure sensor 2, a level instrument 3, a load cell 4 and a controller 5; it is characterized in that the supply of the pressure regulating valve 1 and the air bearing The air pipeline is connected, the pressure sensor 2 is connected to the buffer chamber of the air-floating ball bearing, the control end of the pressure regulating valve 1 and the output end of the pressure sensor 2 are both connected to the controller 5, the level meter 3 and the load cell 4 are installed on the ball bearing The lower end of the seat, the output ends of the level meter 3 and the load cell 4 are all connected to the controller 5; the level meter 3 measures the levelness of the base and outputs the data to the controller 5, and the load cell 4 measures the weight of the test bench body in real time and The data is output to the controller...
Embodiment 2
[0074] The principle of controller design is analyzed as follows:
[0075] According to the closed-loop system described in embodiment 1, in order to analyze the stability of the system, the Lyapunov function is selected as follows:
[0076]
[0077] Deriving the above formula,
[0078]
[0079] use and the following lemma:
[0080] Lemma 1 (Schuler's complement lemma): For symmetric matrices The following descriptions are equivalent:
[0081] 1) L<0,
[0082]
[0083]
[0084] Lemma 2: For matrices and vector equations such that the following integral is defined, then the following inequalities hold:
[0085]
[0086] in
[0087]
[0088] η(t)=[x T (t) x T (t-d(t))x T (t-h)] T (18)
[0089] The following formula can be obtained:
[0090]
[0091] in
[0092]
[0093]
[0094]
[0095]
[0096] Continue processing, you can have:
[0097]
[0098] where is h ij A piecewise linear description, h ij ≡w i m j , Y ij ≥Ω i...
Embodiment 3
[0116] From the above analysis, it can be seen that the obtained controller design method contains a membership function, which means that the method is dependent on the membership degree, which can effectively reduce the conservatism of the system. In addition, the time-delay The idea of cutting is to divide the delay interval [0, h] into [0, d(t) / 2], [d(t) / 2, d(t)], [d(t), [d(t) )+h] / 2] and [[d(t)+h] / 2, h] four sub-intervals, which can increase the degree of time-delay dependence on the one hand, and avoid increasing the heavy computational burden on the other hand.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More