

Controllable suspension sliding mode tracking controller taking vehicle steady state as reference
A steady state, controller technology, applied in the direction of suspension, elastic suspension, vehicle components, etc., can solve the problems of control failure, signal error, inability to take into account comfort and control at the same time, to simplify the design complexity, Simplify design complexity and improve the effect of real-time control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
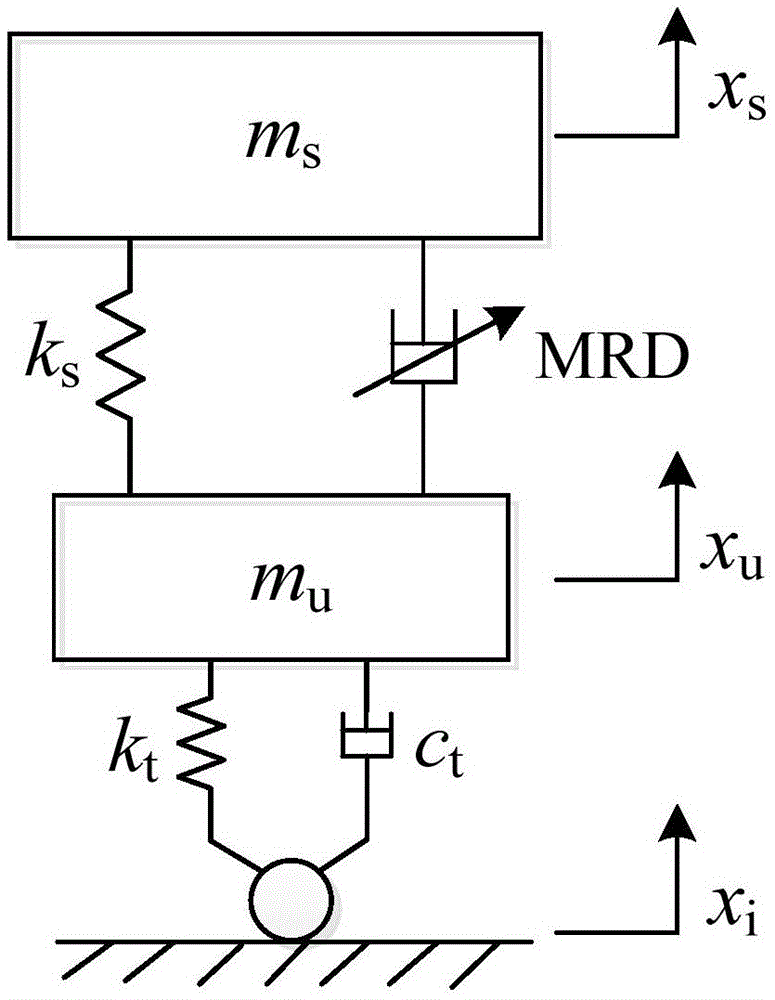
[0053]Taking the application of the present invention in the magnetorheological semi-active suspension system as an example to illustrate the specific implementation, as figure 2 Shown is a model of a "quarter" vehicle magneto-rheological semi-active suspension system. Here, it is assumed that the body sprung mass is m s , the unsprung mass is m u , k s Indicates the stiffness coefficient of the suspension system, F MRD Indicates the output controllable damping force of the magnetorheological damper, k t 、c t represent the stiffness coefficient and damping coefficient of the tire respectively, x s 、x u 、x i Respectively represent the vertical motion displacement of the sprung mass, the vertical motion displacement of the unsprung mass of the suspension system and the road excitation signal borne by the tire.
[0054] Taking the center of mass as the reference coordinates, the dynamic equations of the system are listed below:
[0055] { ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More