A Manipulator System with High Controllability
A manipulator, highly advanced technology, applied in the field of manipulator system, achieves the effects of novel structure, simple structure and lightening the weight of the pump
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
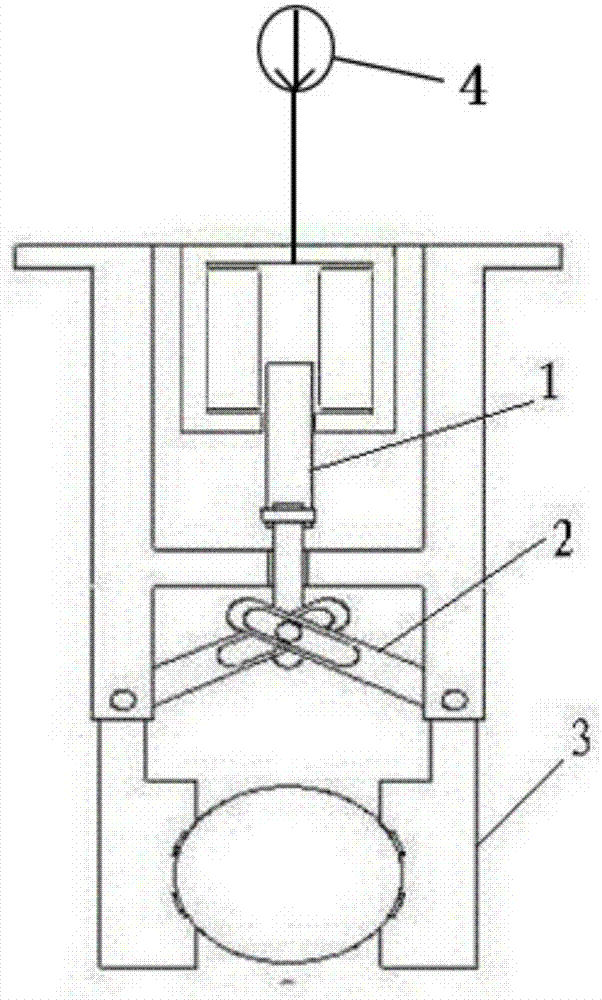
[0031] Such as figure 1 A manipulator system with a high degree of controllability is shown, including a driving part 1, a transmission part 2 and a finger part 3, the driving part 1 is connected through the transmission part 2 and drives the finger part 3, and the driving part 1 It is a hydraulic cylinder, and the finger part 3 includes at least two gripping mechanical fingers; the hydraulic cylinder is supplied with oil by an oil supply pump; the oil supply pump is a giant magnetostrictive pump 4 . The transmission part 2 is two mutually hinged plates. The two transmission parts 2 are provided with slide grooves. The end of the driving part 1 is connected with two transmission parts 2 at the same point. The transmission part 2 is two mutually hinged plates. The two transmission parts 2 are provided with slide grooves. The end of the driving part 1 is connected with two transmission parts 2 at the same point.
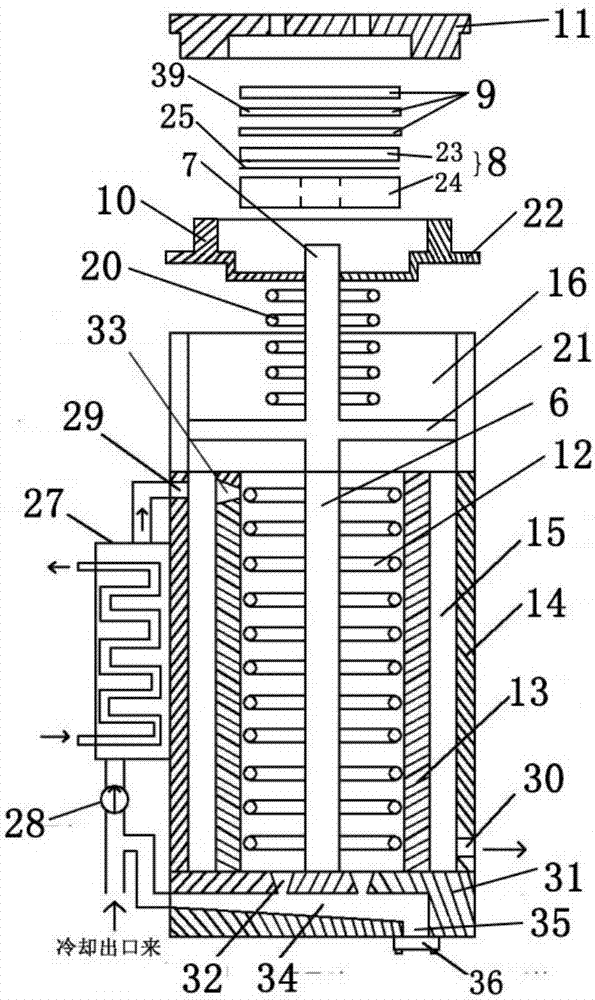
[0032] Such as figure 2 As shown, the giant magnetostricti...
Embodiment 2
[0042] Such as figure 1 A manipulator system with a high degree of controllability is shown, including a driving part 1, a transmission part 2 and a finger part 3, the driving part 1 is connected through the transmission part 2 and drives the finger part 3, and the driving part 1 It is a hydraulic cylinder, and the finger part 3 includes at least two gripping mechanical fingers; the hydraulic cylinder is supplied with oil by an oil supply pump; the oil supply pump is a giant magnetostrictive pump 4 . The transmission part 2 is two mutually hinged plates. The two transmission parts 2 are provided with slide grooves. The end of the driving part 1 is connected with two transmission parts 2 at the same point.
[0043] Such as figure 2 As shown, the giant magnetostrictive pump 4 is installed vertically as a whole, including a pump body, a giant magnetostrictive rod 6, an output shaft 7, a piston assembly 8, a one-way valve assembly 9, a pressure member 10, an end cover 11, and ...
Embodiment 3
[0053] Such as figure 1 A manipulator system with a high degree of controllability is shown, including a driving part 1, a transmission part 2 and a finger part 3, the driving part 1 is connected through the transmission part 2 and drives the finger part 3, and the driving part 1 It is a hydraulic cylinder, and the finger part 3 includes at least two gripping mechanical fingers; the hydraulic cylinder is supplied with oil by an oil supply pump; the oil supply pump is a giant magnetostrictive pump 4 . The transmission part 2 is two mutually hinged plates. The two transmission parts 2 are provided with slide grooves. The end of the driving part 1 is connected with two transmission parts 2 at the same point.
[0054] Such as figure 2 As shown, the giant magnetostrictive pump 4 is installed vertically as a whole, including a pump body, a giant magnetostrictive rod 6, an output shaft 7, a piston assembly 8, a one-way valve assembly 9, a pressure member 10, an end cover 11, and ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More