

Robot automatic control system based on microprocessor visible light communication technology
An automatic control system and visible light communication technology, applied in the general control system, control/regulation system, computer control, etc., can solve the problems of uncontrollable transmission direction, WIFI is easily interfered by electromagnetic interference, passwords are easily intercepted, etc., to improve Processing performance, good confidentiality, and the effect of reducing loss
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
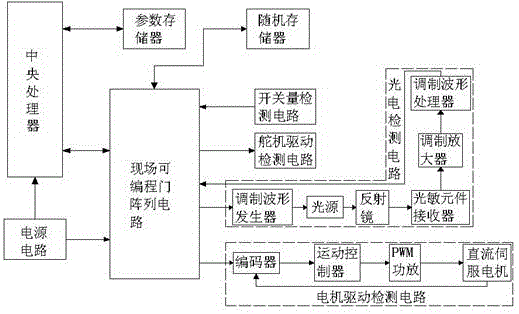
[0028] A robot automatic control system based on microprocessor visible light communication technology, such as figure 1 As shown, it includes a central processing unit, a field programmable gate array circuit, a photoelectric detection circuit, a light-controlled lock module, an optical key module, and a white light LED. The central processing unit is connected to the field programmable gate array circuit, and the field programmable gate The array circuit is connected to the optical control lock module, the white LED is connected to the field programmable gate array circuit, the field programmable gate array circuit is connected to the optical key module, and the photoelectric detection circuit is connected to the field programmable gate array circuit; the photoelectric detection The circuit is provided with a photosensitive element receiver, a mirror, a light source, a modulation waveform generator, a modulation waveform processor, and a modulation amplifier. The field programm...
Embodiment 2
[0034] This embodiment is further optimized on the basis of the above embodiments. Further, in order to better realize the present invention, the PWM control mode can be used to adjust and control the motor speed, such as figure 1 As shown, the following structure is particularly provided: an encoder, a motion controller, a PWM power amplifier, and a DC servo motor are arranged in the optical control lock module, the field programmable gate array circuit is connected to the encoder, and the encoder is connected The motion controller is connected to a PWM power amplifier, the PWM power amplifier is connected to a DC servo motor, and the DC servo motor is connected to an encoder.
[0035] In order to control the robot's running trajectory and actions, the field programmable gate array circuit loads the robot's running trajectory and action data into the optical lock module, optical key module and white light LED after corresponding conversion. The robot's driving part is mainly a mot...
Embodiment 3
[0037] This embodiment is further optimized on the basis of any of the above embodiments. Further, in order to better implement the present invention, in order to facilitate the improvement of processing performance, and to store more robot trajectories and actions, such as figure 1 As shown, the following structure is especially provided: it also includes a parameter memory, which is connected to the central processing unit, and the robot trajectory data and motion data are stored in the parameter memory. The central processing unit will load such data after reading Into the field programmable gate array circuit, used to control the robot's trajectory and action.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More