

A control system and method for a greenhouse logistics plant protection robot
A control system and robot technology, applied in the field of agricultural machinery, can solve the problems of limited terrain and space, inability to accurately locate automatic driving, mechanization, and low degree of automation.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
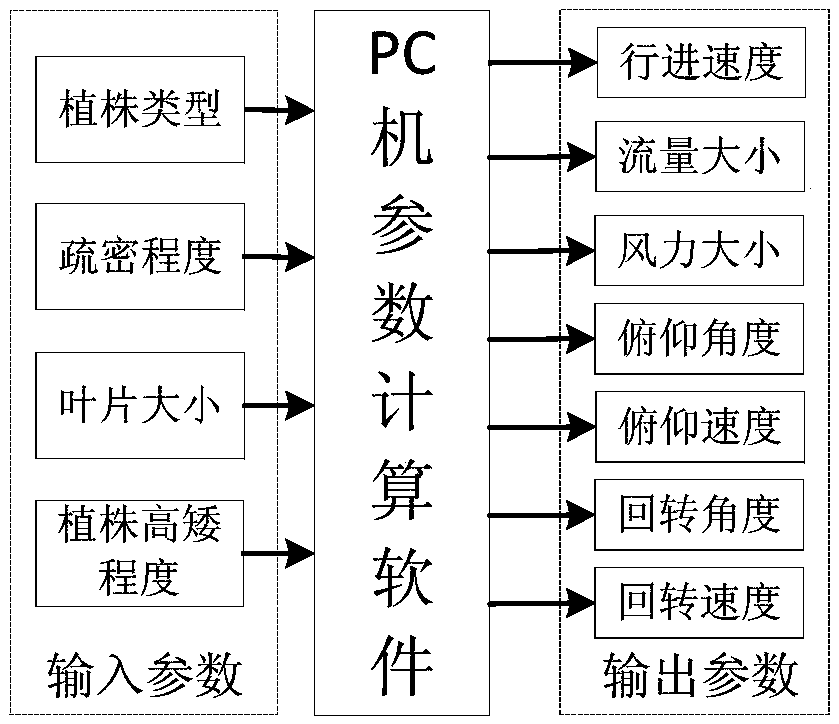
[0051] Below in conjunction with accompanying drawing, the patent of the present invention is further described. The control system and method of a greenhouse logistics plant protection robot according to the present invention, the control device includes: an operation parameter configuration system, a detection system and a control system. like figure 1 As shown, the operation parameter configuration system includes the parameter configuration of the spray mode and the logistics mode. Spray mode parameter configuration: develop relevant greenhouse operation parameter calculation PC software, the operator inputs intuitive parameters obtained in the greenhouse on the PC, and automatically calculates the parameters that can be recognized by the single-chip microcomputer through the PC software. Among them, the intuitive parameters obtained in the greenhouse include plant type, density, leaf size, and height of plant growth; parameters that can be recognized by the single-chip m...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More