

Robot welding motion control method based on laser seam tracking sensor
A robot welding and motion control technology, applied in laser welding equipment, welding equipment, manufacturing tools, etc., can solve the problems of inability to meet the requirements of industrial welding accuracy, lack of unknown welding trajectories, etc., to achieve fast execution efficiency, good versatility, High welding precision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0014] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
[0015] (1) Initial parameter setting of robot motion algorithm
[0016] According to the robot kinematics theory, set the robot sensor world coordinate system {W}, and the robot end tool coordinate system {T}.
[0017] Robot world coordinate system {W}: the coordinate system O w -X w Y w Z w It is used to uniformly describe the pose and coordinates of various objects such as robots, welding torches, and welds.
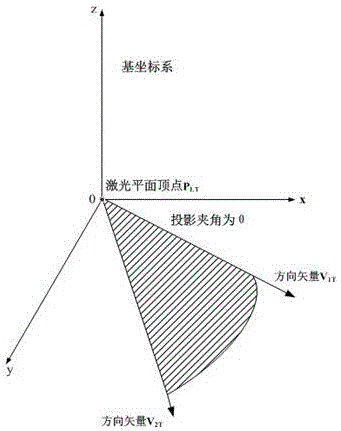
[0018] Robot end coordinate system {T}: the coordinate of welding torch vertex is P TT , the torch direction vector is V TT . Such as figure 1 As shown, the vertex of the laser triangle plane is P LT , the direction vectors of the two boundaries of the triangular plane are V 1T , V 2T . And set the welding speed as v, the motion period of the control system as t, and the leading distance between the sensor and the welding to...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More