

Quadrotor unmanned aerial vehicle finite time attitude tracking control method
A quad-rotor UAV, limited time technology, applied in attitude control, non-electric variable control, control/regulation system and other directions, can solve the problem that quad-rotor UAV cannot achieve limited-time attitude tracking, etc. performance and steady-state performance, the effect of improving robustness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
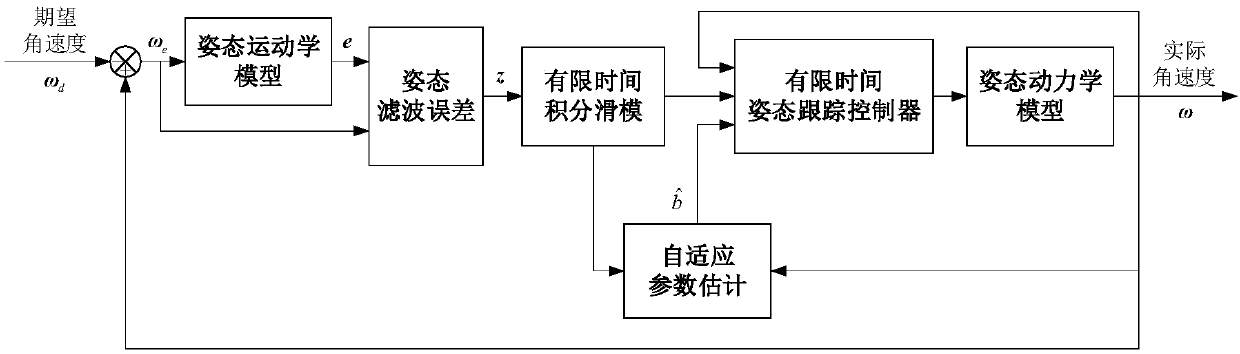
[0023] Specific embodiment one: the idea of a kind of quadrotor unmanned aerial vehicle limited time attitude tracking control method of the present invention is:
[0024] First, establish a kinematics model based on the relative motion of the quadrotor UAV attitude tracking; analyze and model the disturbance torque faced by the quadrotor in actual engineering, unknown moment of inertia, control output saturation and actuator failure, etc. Stability factors, establishing a dynamic model for quadrotor UAV attitude tracking;
[0025] Second, based on the principle of stabilizing the attitude error in a finite time, the attitude filter error is defined; based on the sliding mode control method that is insensitive to parameter changes and disturbances, a finite time integral sliding mode surface is designed, and the constant disturbance is suppressed by introducing an integral term, reducing Small steady-state error;
[0026] Third, based on the design principle of simple struc...
specific Embodiment approach 2
[0033] Specific embodiment two: the difference between this embodiment and specific embodiment one is: the specific process of establishing the kinematics model of the four-rotor UAV attitude tracking in the step one is:
[0034] Considering that the attitude of the quadrotor UAV is described by the quaternion, the relative motion of the attitude tracking of the quadrotor UAV can be expressed as:
[0035]
[0036] in, respectively represent the attitude tracking error and angular velocity error of the UAV body coordinate system relative to the desired coordinate system, and have represent the body attitude and angular velocity of the UAV, respectively; represent the desired attitude and angular velocity of the UAV, respectively, and ω d , known and bounded; Indicates the attitude rotation matrix of the UAV body coordinate system relative to the desired coordinate system, and has and ||C||=1; Represents quaternion multiplication; · T Represents the transp...
specific Embodiment approach 3
[0041] Specific embodiment three: the difference between this embodiment and specific embodiment one or two is: the specific process of establishing the dynamic model of quadrotor UAV attitude tracking in the said step two is:
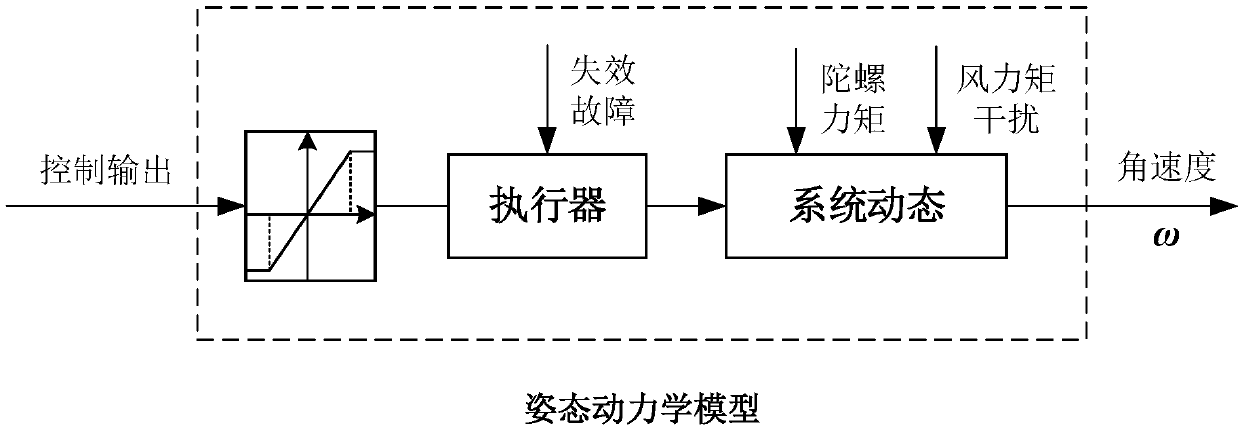
[0042] The actuator of the quadrotor UAV is a brushless DC motor, which has the maximum allowable instantaneous current. In order to avoid motor burnout, it is necessary to consider the constraint of control output saturation in the control design; Some failures may occur due to the impact of high-intensity tasks; in addition, quadrotor UAVs have been affected by external wind torque interference and gyro torque and other interference torques. The above factors need to be considered in the modeling analysis of quadrotor UAV attitude dynamics. The specific modeling analysis is as follows: figure 2 shown.
[0043]In summary, considering the disturbance torque, unknown moment of inertia, control output saturation and actuator failures faced by the quadr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More