

Driving-and-control-integrated control system and control method for joint-type mechanical arm
A technology of control system and control method, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of limited load power, long time-consuming, high cost of INTEL-based industrial computer, improve real-time performance, and ensure smooth motion Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0036] The invention provides an integrated drive-control control system and control method for an articulated mechanical arm. The present invention will be described in detail below in conjunction with the accompanying drawings.
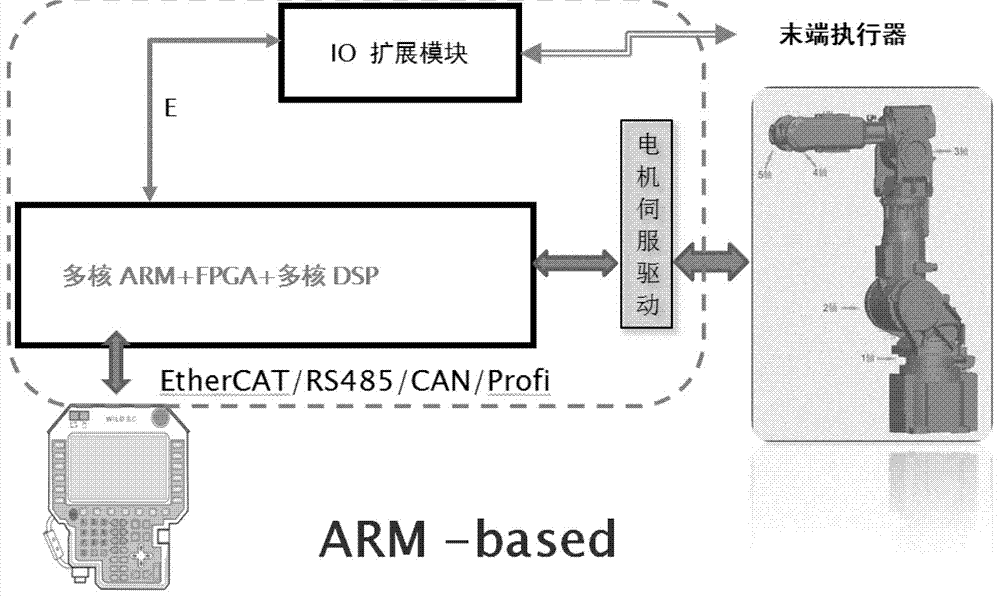
[0037] The invention utilizes one integrated ARM-DSP chip and two FPGA chips to complete the main control of the robot control system and the motion control of the motor. figure 1 It is the control system architecture diagram, as shown in the figure, the core part of the system on the physical module is the system main control board composed of multi-core ARM+DSP, FPGA, IO expansion module, motor servo drive module and Ethercat or RS485 or CAN or Profilebus network Bus communication interface.
[0038] figure 2 It is a structural diagram of the system hardware. As shown in the figure, the system hardware is mainly composed of the main control board, signal integration module, IPM drive amplifier module, and system strong current circuit contactor...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More