

PID controller parameter setting algorithm based on improved PSO (particle swarm optimization) algorithm
An improved particle swarm and parameter tuning technology, applied in the field of PID control, can solve problems such as premature convergence or stagnation, easy premature maturity, and large error of PID controller control effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
[0027] The specific implementation of the patent of the present invention will be described below in conjunction with the accompanying drawings. It must be emphasized that the embodiments described here are only used to illustrate and explain the patent of the present invention, and are not intended to limit the patent of the present invention.
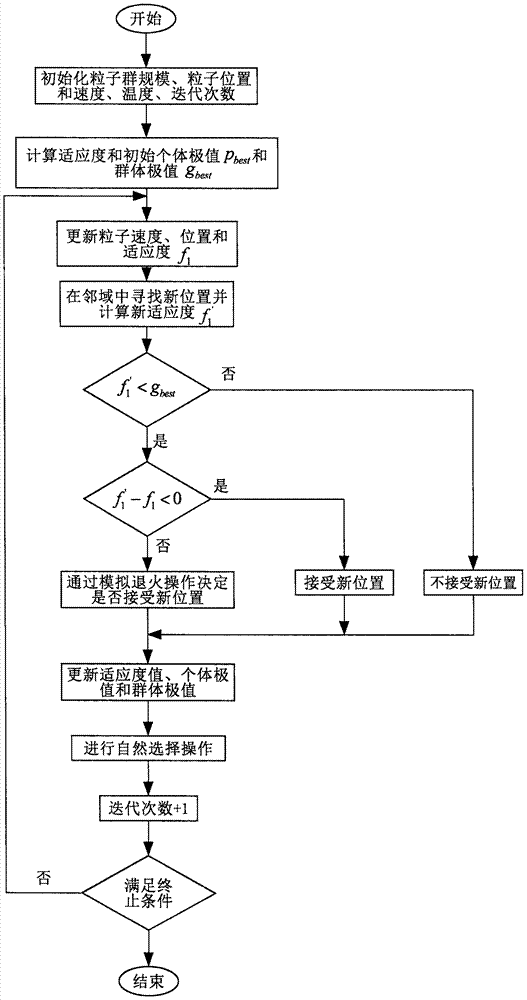
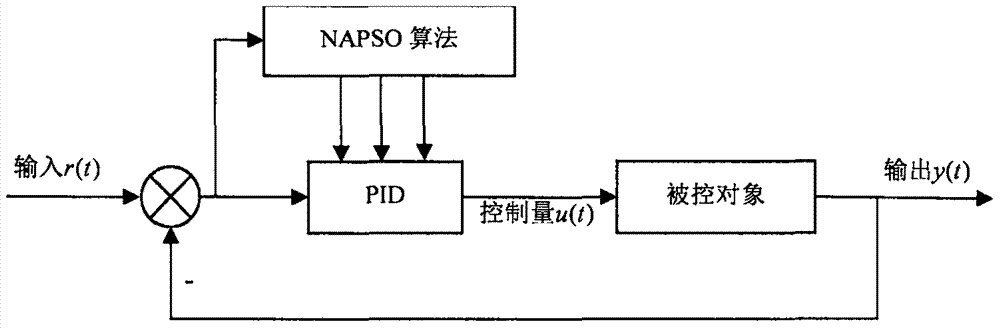
[0028] refer to figure 2 The schematic diagram of a PID control system based on improved particle swarm includes NAPSO algorithm, PID controller and controlled object.
[0029] When the program is running, during each cycle, the fixed value r(t) and the actual output value y(t) form a deviation e(t) through the adder, and e(t) is passed to the NAPSO algorithm and the PID controller. The NAPSO algorithm continuously optimizes the 3 parameters of the PID controller: k p 、k i and k d , seek the minimum deviation e(t), and pass the optimized three parameters to the PID controller. The PID controller calculates the control quantity u(...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More