

Control system of four-foot robot
A quadruped robot and control system technology, applied in the direction of program-controlled manipulators, manipulators, manufacturing tools, etc., can solve the problems of high software and hardware development requirements, inconvenient modularization, and inconvenient development and collaboration of engineers
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
no. 1 example
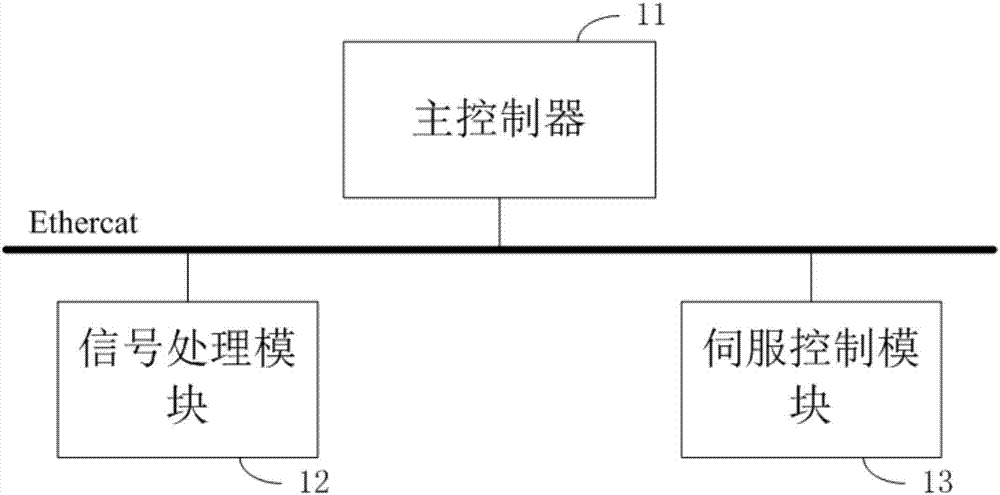
[0016] This embodiment provides a technical solution for a control system of a quadruped robot. In this technical solution, the control system of the quadruped robot includes: a main controller 11 , a signal processing module 12 , and a servo control module 13 .
[0017] see figure 1 , the control system of the quadruped robot includes: a main controller 11 , a signal processing module 12 , and a servo control module 13 .
[0018] The main controller 11 is the control core of the whole control system. It is respectively connected with the signal processing module 12 and the servo control module 13 through the Ethercat bus. Through the Ethercat bus, the main controller 11 obtains various sensing signals and control signals from the signal processing module 12, processes the acquired sensing signals and control signals, generates servo control signals for controlling the servo motor, and sends the servo The control signal is transmitted to the servo control module 13 to compl...
no. 2 example
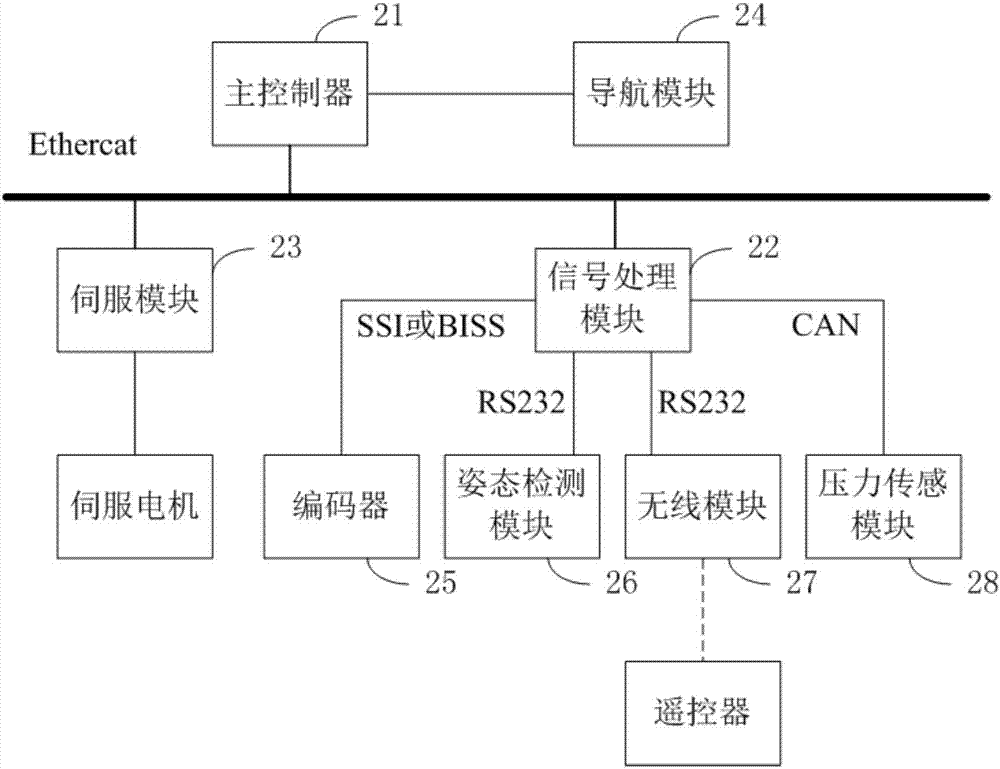
[0024] This embodiment provides another technical solution of the control system of the quadruped robot. In this technical solution, the control system of the quadruped robot includes: a main controller 21, a signal processing module 22, a servo control module 23, a navigation module 24, an encoder 25, an attitude detection module 26, a wireless module 27, and a pressure detection module 28.
[0025] The servo control module 23 is connected with the servo motor, and the servo control module 23 is used to realize the speed control, position control and torque control of the servo motor.
[0026] Wherein, the signal processing module 22 adopts ARM or DSP or MCU or FPGA as the main control chip, the signal processing module 22 can process the encoder signal of SSI or BISS protocol, and the output pin of the main control chip can output the Clock with adjustable baud rate. clock signal. The Clock clock signal is input to the encoder 25, and the encoder 25 returns a DATA signal. ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More