

Hydraulic pressure driven flexible mechanical paw
A mechanical claw and water pressure technology, applied in the direction of manipulators, chucks, manufacturing tools, etc., can solve the problems of bulky and complex systems, low pressure of flexible robotic claws, and inability to work in deep sea, so as to avoid environmental pollution and increase driving force and gripping force, the effect of simple structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
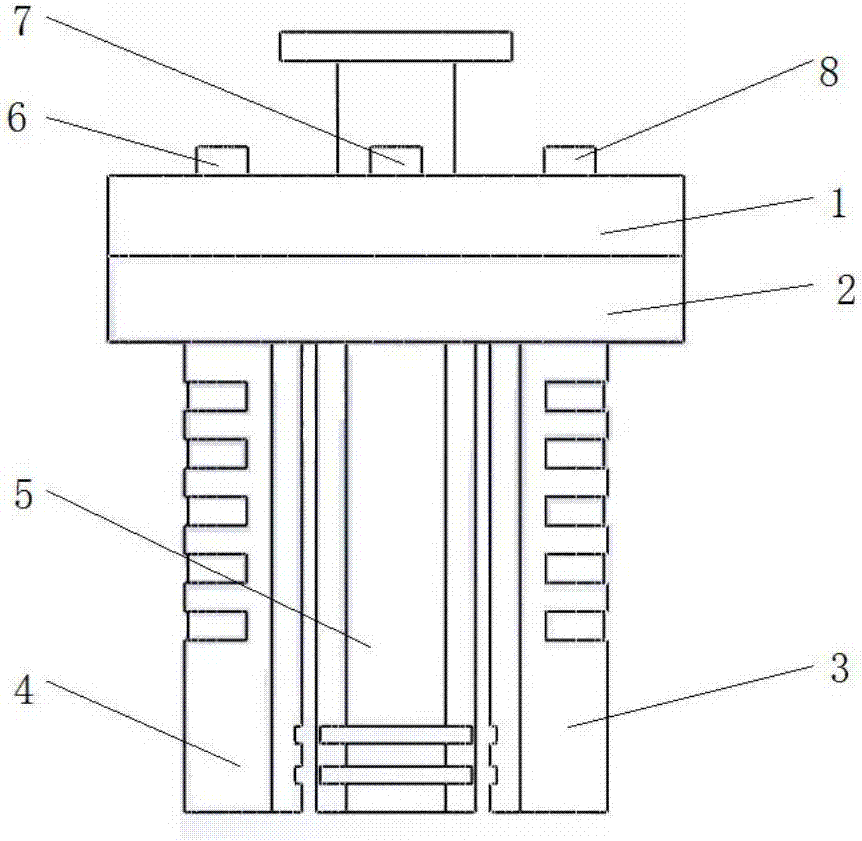
[0025] The present invention provides a water-hydraulic driven flexible robotic gripper, and the specific implementation will be further described below in conjunction with the accompanying drawings. Such as Figure 1a As shown, it mainly includes pressure plate (1), pressure seat (2), software driver (3, 4, 5), hexagon socket head screws (6, 7, 8), etc., pressure plate (1) and pressure seat (2) Made of corrosion-resistant alloy, it can adapt to deep sea environment. The inlet of the pressure plate (1) is designed as a flange type or a pipe joint type, which can be adjusted according to different working environments. The high-pressure water flows from the water pressure high-frequency electromagnetic switch valve (15) through the inlet of the pressure plate (1) into the internal channel. The flow flows to the three soft actuators (3, 4, 5) respectively, and the internal pressure and inflow flow of the three soft actuators are the same, so that the synchronous action of the th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More