Identification method of robot motion system based on quasi-model calibrated Kalman filter
A Kalman filter, robot motion technology, applied in general control systems, control/regulation systems, instruments, etc., can solve problems such as lack of fit and linearization, and achieve convenient parameter adjustment, good identification effect, and good fitting. effect of effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
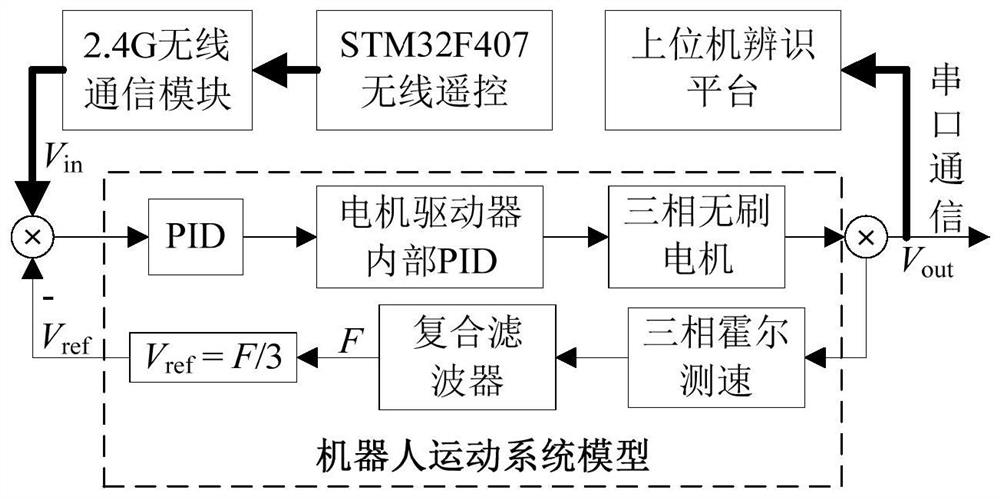
[0047] figure 1 Shown is a schematic structural diagram of the inspection robot motion system identification platform in this embodiment. The inspection robot control platform consists of a remote controller with STM32F407ARM as the main control chip, a PID main controller with STM32F103ARM as the core, a 2.4G wireless communication module, and a motor driver. Module, Hall speed sensor, composite filter, etc.
[0048] During normal operation, the robot is in automatic inspection mode without manual intervention. The hand-held remote control is used to manually control the robot to perform corresponding actions when an abnormal situation occurs. The main controller is used to receive instructions from the remote controller, and obtain speed information by decoding the instructions from the remote controller. And the given speed information is calculated by the PID algorithm to obtain the PWM wave signal of the corresponding duty ratio, and the PWM wave signal is output to the...
Embodiment 2
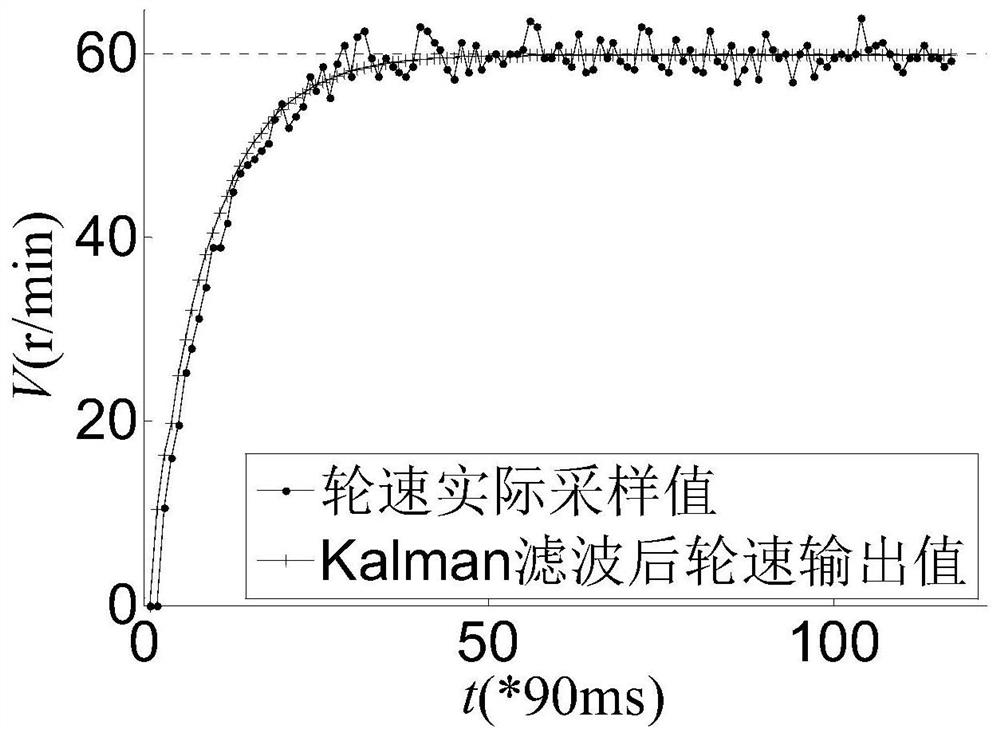
[0092] This embodiment compares the identification effects of the Kalman filter with quasi-model calibration and without quasi-model calibration at the same set wheel speed.
[0093] Using the same set of robot wheel speed sampling data, the Kalman filter with quasi-model calibration and the Kalman filter without quasi-model are used to identify the model of the motion system. The identification effect is compared and verified by the identification curve diagram and identification related parameters, and finally the comparison effect in the two cases is obtained. Since the quasi-model is integrated into the Kalman filtering algorithm, the Q value of the system noise parameter can be appropriately small. In this embodiment, the Q value is set to be 0.015. When the set robot wheel speed is 60r / min, a set of wheel speed adjustment data is collected, and the quasi-model fitted by least squares is substituted into the Kalman filter to draw a fitting curve, as shown in image 3 As ...
Embodiment 3
[0103] In this embodiment, the robustness of Kalman filter identification with quasi-model calibration and without quasi-model calibration is compared, different Q values are used for identification, and identification curves and key parameter quantitative analysis tables are made.
[0104] Take a robot wheel speed sample with a rotation speed of 60r / min, Figure 7-9 Shown are the identification curves of the group of samples identified by the quasi-model calibration Kalman filter when Q takes different values, and Table 2 shows the corresponding identification key quantities. Such as Figure 10-12 As shown, it is the identification curve of the group of samples identified by the Kalman filter without quasi-model calibration when Q takes different values respectively, and Table 3 is the list of corresponding identification key quantities.
[0105]Since the Kalman filter without an accurate model requires a large number of sample points for calibration, in order to improve...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More