

Robot for underwater welding, robot system and operation method
A robot system and underwater welding technology, applied in welding equipment, auxiliary welding equipment, welding/cutting auxiliary equipment, etc., can solve the problems of difficult welding seam detection and positioning, many interferences, and difficult matching of feature points, etc., to achieve guaranteed Welding reliability, the effect of accurate welding
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0042] In order to describe the technical content, structural features, achieved goals and effects of the present invention in detail, the following will be described in detail in conjunction with the embodiments and accompanying drawings.
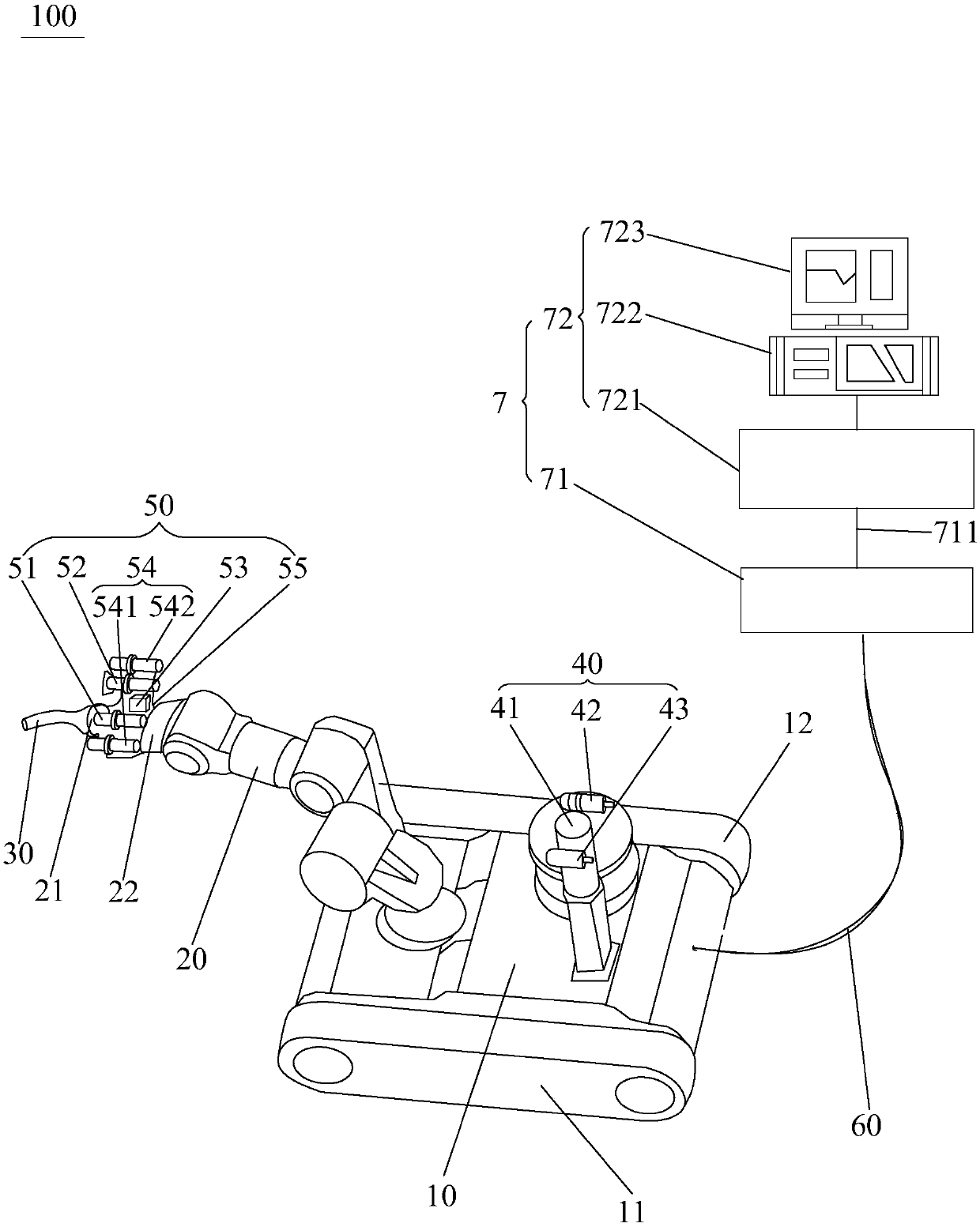
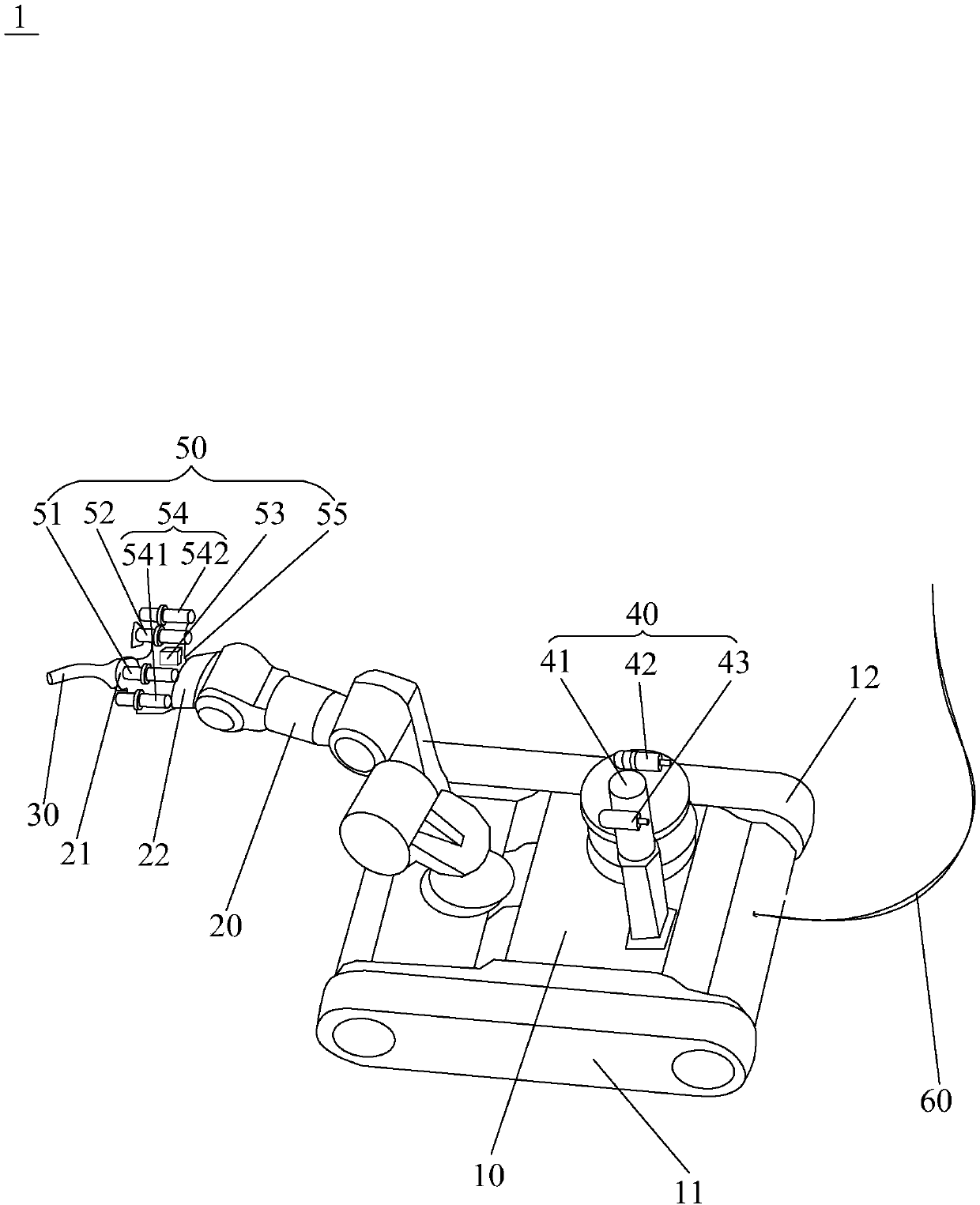
[0043] Please refer to figure 1 , the present invention provides a robot system 100 for underwater welding, including a robot 1 for underwater welding and a control monitoring module 7, the robot 1 for underwater welding can be controlled by the control monitoring module 7 Identify and weld the welding seam, including the mobile carrier 10, the panoramic camera module 40 installed on the mobile carrier 10, the multi-degree-of-freedom mechanical arm 20, the welding torch 30 installed on the end joint 21 of the multi-degree-of-freedom mechanical arm 20, the installation The visual detection module 50 of the adjacent terminal joint 22 of the multi-degree-of-freedom mechanical arm 20 coaxially connected with the terminal joint 21, and the comm...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More