

Power-stage semi-physical simulation system of robot joint controller
A robot joint, semi-physical simulation technology, applied in the field of semi-physical simulation, can solve the problems of inability to test and simulate the variable load performance of the servo system, the accuracy and dynamic performance of the robot's semi-physical simulation cannot be well simulated, etc. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
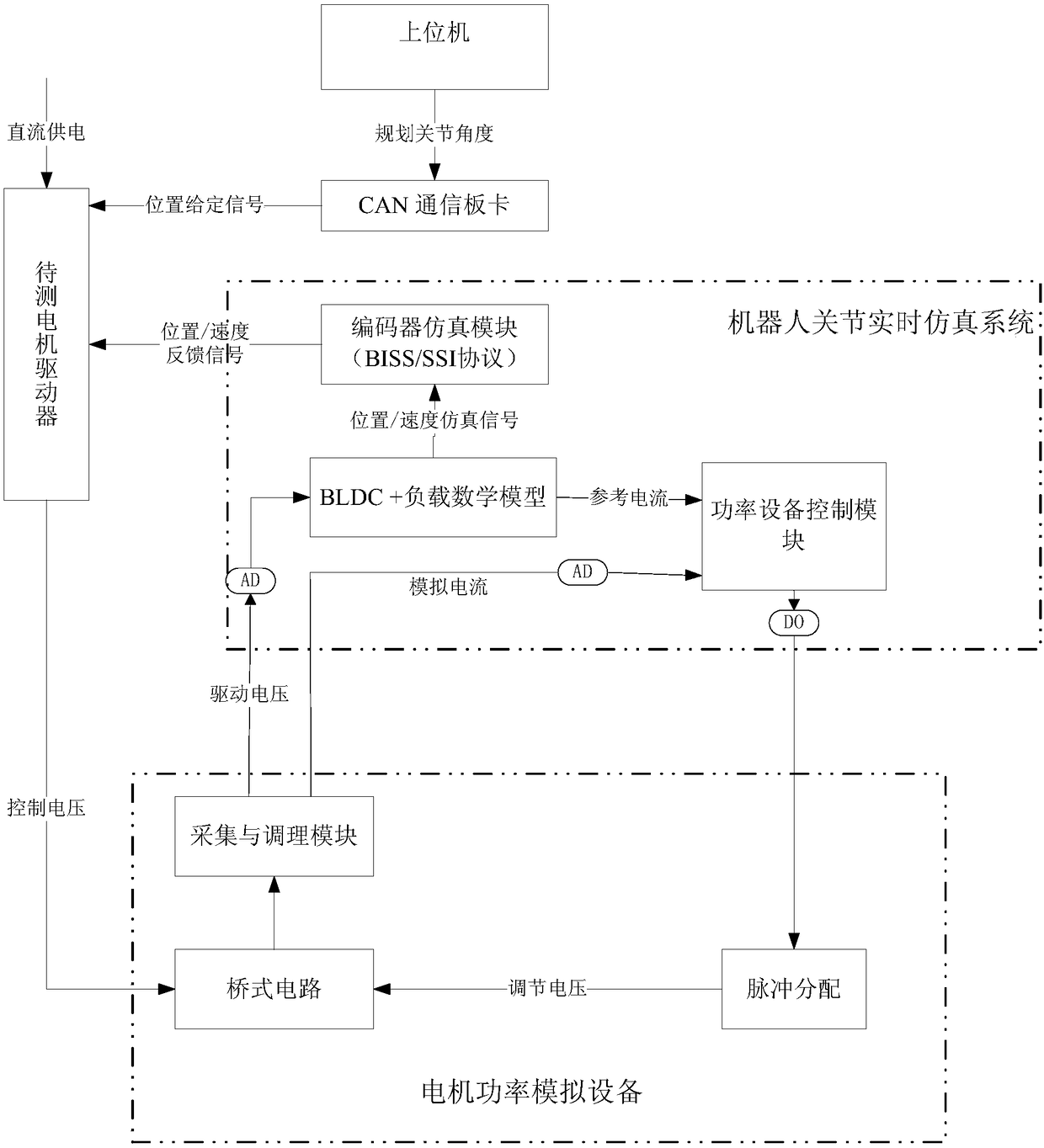
[0032] like figure 1 As shown, the semi-physical simulation system of the present invention includes a host computer, a real-time simulation system for robot joints, a CAN communication board, a motor driver to be tested, and a motor power simulation device.
[0033] Host computer: Calculate the position given signal (planned joint angle) of the robot joint according to the task to be performed by the robot, and output it to the motor driver to be tested through the CAN communication board.
[0034] Motor driver to be tested: Calculate the control voltage of the robot joint control motor according to the given signal of the robot joint position, output the control voltage to the motor power simulation device, receive the given position signal of the robot joint sent by the host computer and the real-time simulation of the robot joint The actual position feedback signal of the robot joint sent by the system is adjusted according to the position given signal and the actual posit...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More