

Six-freedom-degree parallel machine arm driven by tubular linear motors and control method of six-freedom-degree parallel machine arm
A linear motor, degree of freedom technology, applied in the direction of AC motor control, control system, electric components, etc., can solve the problems of large size and complex mechanical structure.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0064] The present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments. This embodiment is carried out on the premise of the technical solution of the present invention, and detailed implementation and specific operation process are given, but the protection scope of the present invention is not limited to the following embodiments.
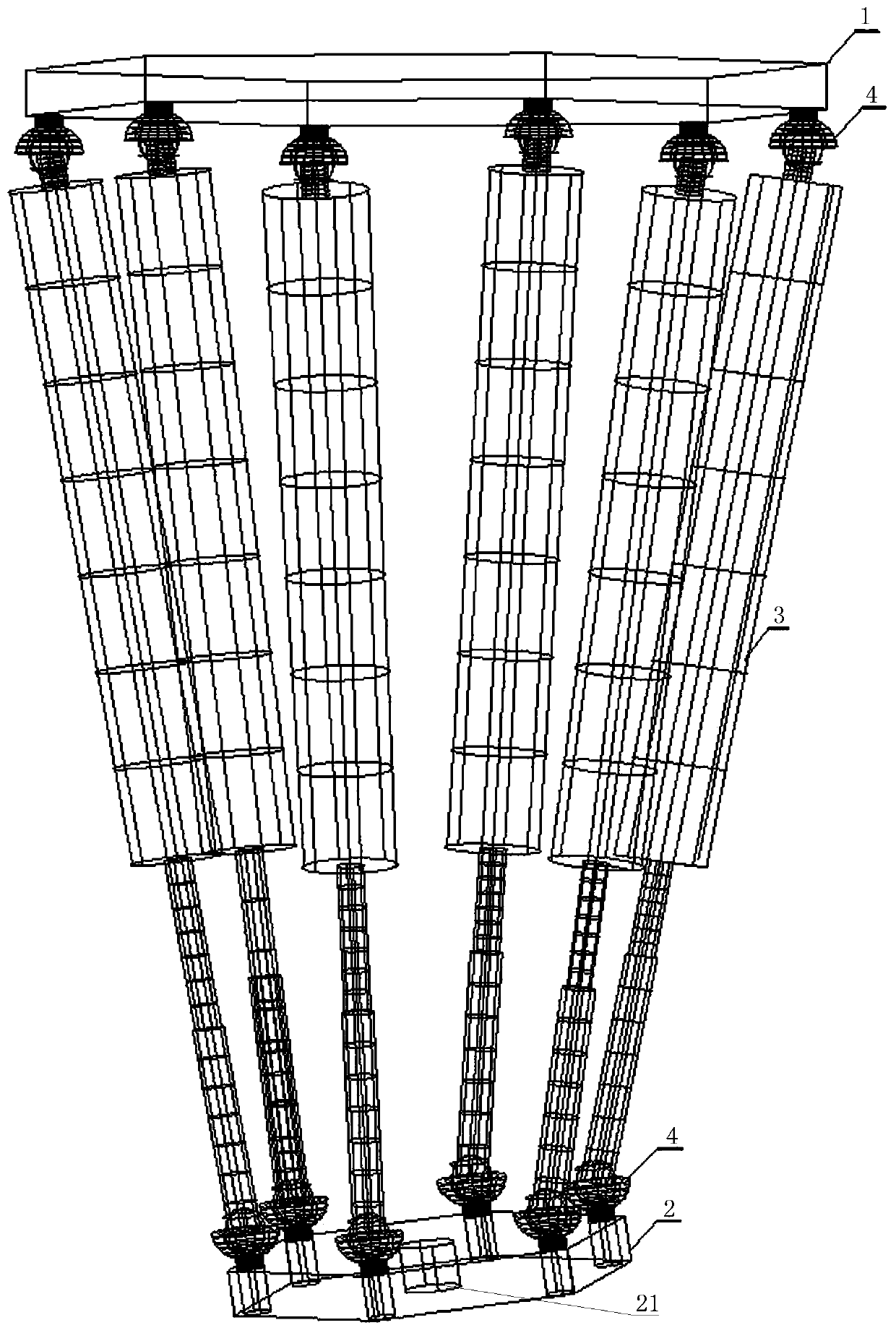
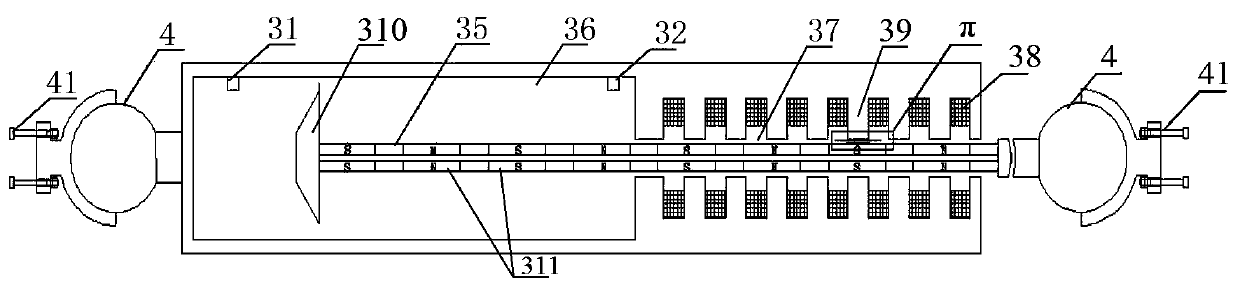
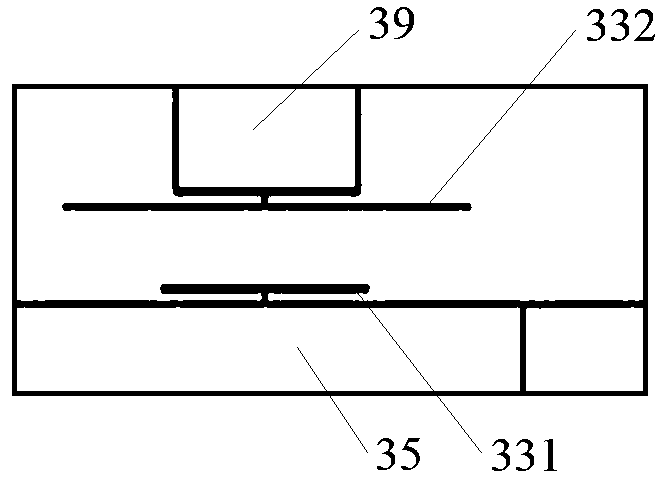
[0065] Such as figure 1 , figure 2 and Figure 7 As shown, a six-degree-of-freedom parallel robotic arm driven by a tubular linear motor includes a static platform 1, a moving platform 2, an upper limit photoelectric sensor 31, a lower limit photoelectric sensor 32, a grating ruler sensor 33 and a parallel controller 5. A plurality of tubular linear motors 3 are evenly distributed between the platform 1 and the moving platform 2. In this embodiment, the tubular linear motors 3 adopt six tubular permanent magnet synchronous linear motors, and each tubular linear motor 3 includes an ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More