

Motor servo system parameter identification method and anti-backlash control method
A servo system and parameter identification technology, applied in motor control, control system, electrical digital data processing, etc., can solve the problems of inability to know the identification result, increase the computational complexity of identification algorithm, disadvantage of high-precision control, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0082] The present invention will be described in detail below with reference to the accompanying drawings and examples.
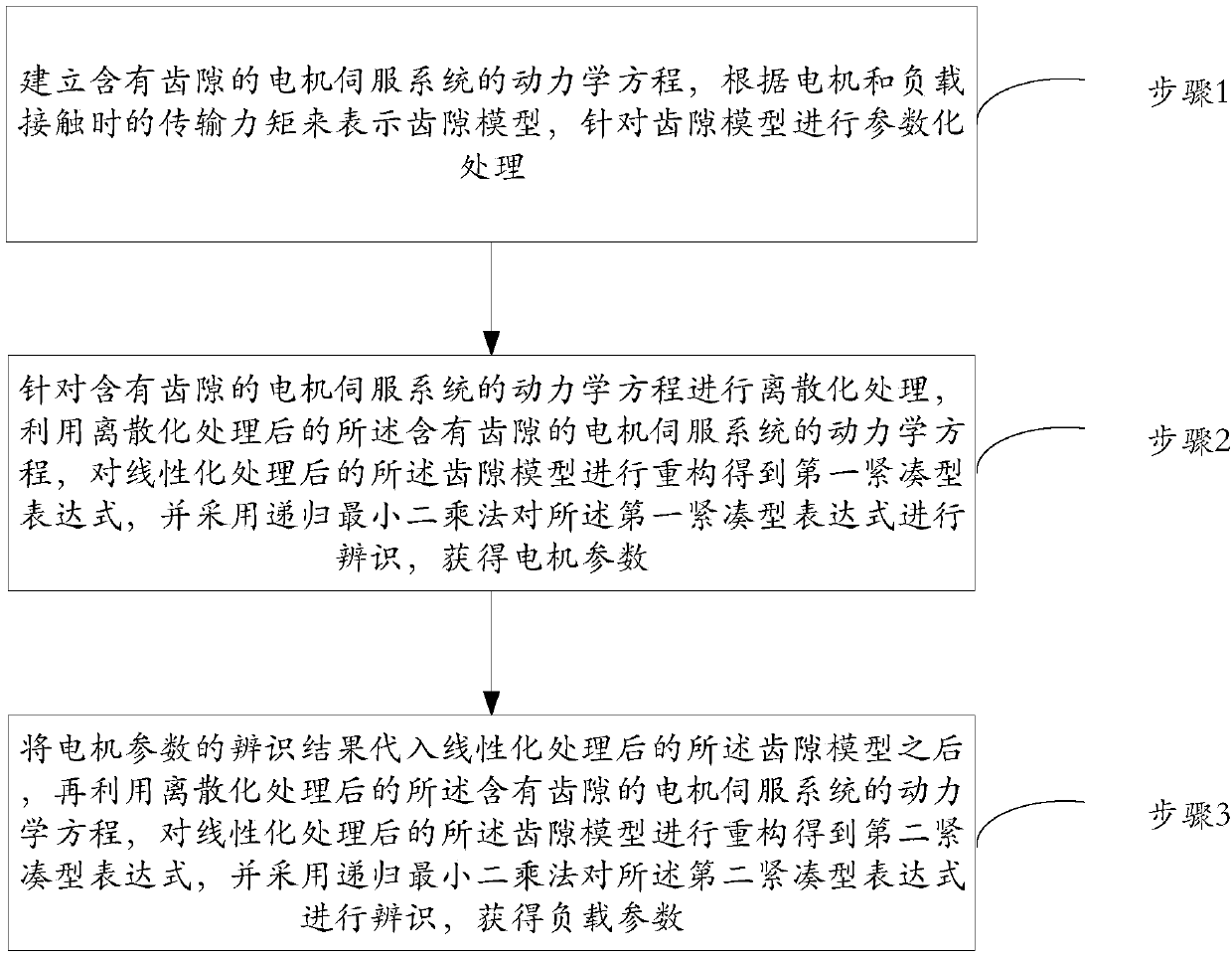
[0083] Please refer to figure 1 , figure 1 A flow chart of a method for identifying parameters of a motor servo system provided by an embodiment of the present invention is shown, and the identification method includes the following steps:
[0084] Step 1. Establish the dynamic equation of the motor servo system with backlash, express the backlash model according to the transmission torque τ(t) when the motor and the load are in contact, and perform parameterized processing on the backlash model.
[0085] S101, establishing the dynamic equation of the motor servo system containing backlash:
[0086]
[0087] Among them, θ(t), are the displacement and speed of the motor, respectively; θ m (t), are the displacement and rotational speed of the load, respectively; Indicates the first derivative of *; Indicates the second derivative of *; J is the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More