

Robot welding track autonomous programming system and method based on vision sensing
A robot welding and visual sensing technology, applied in welding equipment, auxiliary welding equipment, welding/cutting auxiliary equipment, etc., can solve the problems of precision influence, difficulty in meeting efficiency and precision, etc., to improve manufacturing flexibility and avoid man-machine connection. The effect of mixing jobs and improving programming efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
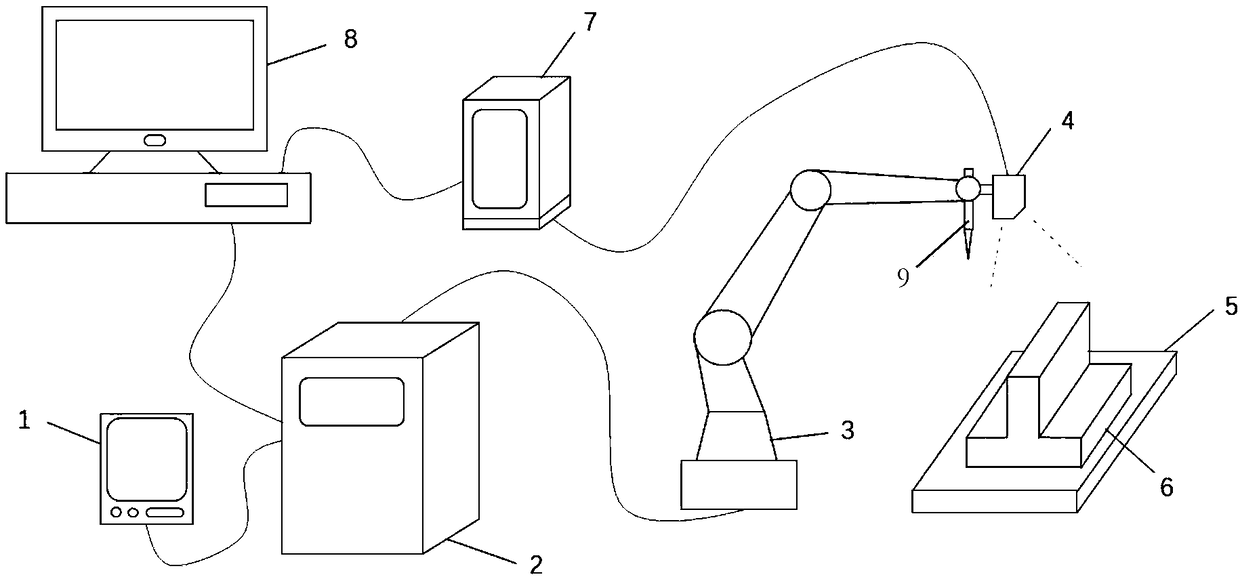
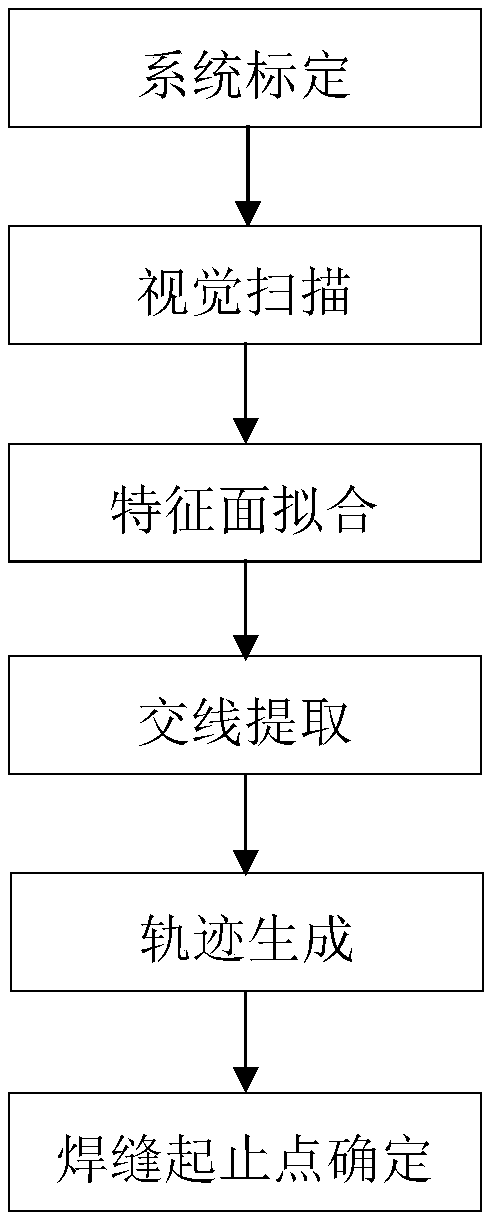
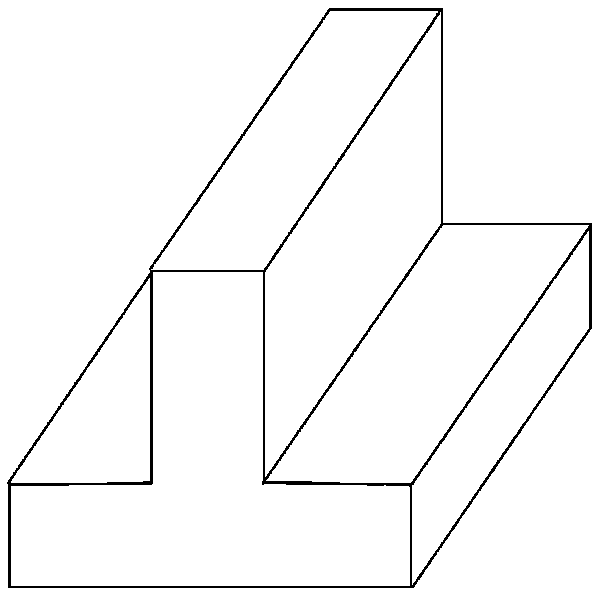
[0031] see figure 2 , image 3 and Figure 4 , an autonomous programming method of robot welding trajectory based on visual sensing is used for automatic welding of T-shaped plate fillet welds, including the following steps:
[0032] System calibration: calibrate the 3DH parameters of the industrial robot to determine the robot base coordinate system, calibrate the industrial robot end effector 9TCP to determine the robot end coordinate system, and then obtain the transformation matrix between the robot base coordinate system and the robot end coordinate system [R( δ), T(δ)] (where R is the rotation matrix, T is the translation matrix, and δ is the robot joint angle vector), and the coordinates of TCP in the end coordinate system of the robot [L x , L y , L z ]. The position coordinates of TCP in the robot base coordinate system can be calculated according to [R(δ), T(δ)]·[L x , L y , L z ,1] T calculated;
[0033] Visual scanning: According to the scanning program,...
Embodiment 2
[0039] see figure 2 , Figure 5 and Figure 6 , an autonomous programming method of robot welding trajectory based on visual sensing is used for automatic welding of 90-degree intersecting pipes, including the following steps:
[0040] System calibration: calibrate the 3DH parameters of the industrial robot to determine the robot base coordinate system, calibrate the end effector TCP of the industrial robot to determine the robot end coordinate system, and then obtain the transformation matrix between the robot base coordinate system and the robot end coordinate system [R( δ), T(δ)] (where R is the rotation matrix, T is the translation matrix, and δ is the robot joint angle vector), and the coordinates of TCP in the end coordinate system of the robot [L x , L y , L z ]. The position coordinates of TCP in the robot base coordinate system can be calculated according to [R(δ), T(δ)]·[L x , L y , L z ,1] T calculated;
[0041] Visual scanning: according to the scanning ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More