

Minimally-invasive-surgery-robot three-dimensional force sensor based on fiber gratings
A surgical robot, fiber grating technology, applied in the measurement of force by measuring the change of the optical properties of the material when it is stressed, measuring the force applied to the control element, the instrument and other directions, can solve the lack of system, difficult to use, fiber grating The demodulation method does not have problems such as universality, and achieves the effect of high sensitivity and simple structure
Inactive Publication Date: 2018-09-28
NANKAI UNIV
View PDF5 Cites 17 Cited by
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
[0010] Chinese patent CN106248269A "Temperature-insensitive two-dimensional stress sensor based on fiber grating" provides a method for measuring stress using a fiber grating force sensor, but the force sensor in this patent is limited to the measurement of two-dimensional directional force and cannot be obtained. The force in the axial direction is known, and the decoupling of the force information is lacking. Although for the hollow glass fiber rod, the radial force has a greater influence on the deformation of the rod than the axial force, but the lack of axial force Measurements would render the system unusable for actual surgical control
[0011] Chinese patent CN103822738A "Stress Sensor Based on Fiber Bragg Grating" provides a method of pasting the grating pair on the elastic body to measure the external stress. In this patent, the fiber grating is pasted at both ends, which can effectively curb the chirp effect , but the fiber grating demodulation method it provides is not universal, and the measurement of stress by this method is limited to the measurement of one-dimensional radial force, and the patent also lacks the decoupling of force information
However, this method requires a large number of samples for network training and learning. The workload of data processing is too large, the requirements for software and hardware are high, and the time is too long. It is difficult to use in the actual calibration process.
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View moreImage
Smart Image Click on the blue labels to locate them in the text.
Smart ImageViewing Examples

Examples
Experimental program
Comparison scheme
Effect test
Embodiment 1
[0035] Below in conjunction with accompanying drawing and embodiment this patent is described further.
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More PUM
 Login to View More
Login to View More Abstract
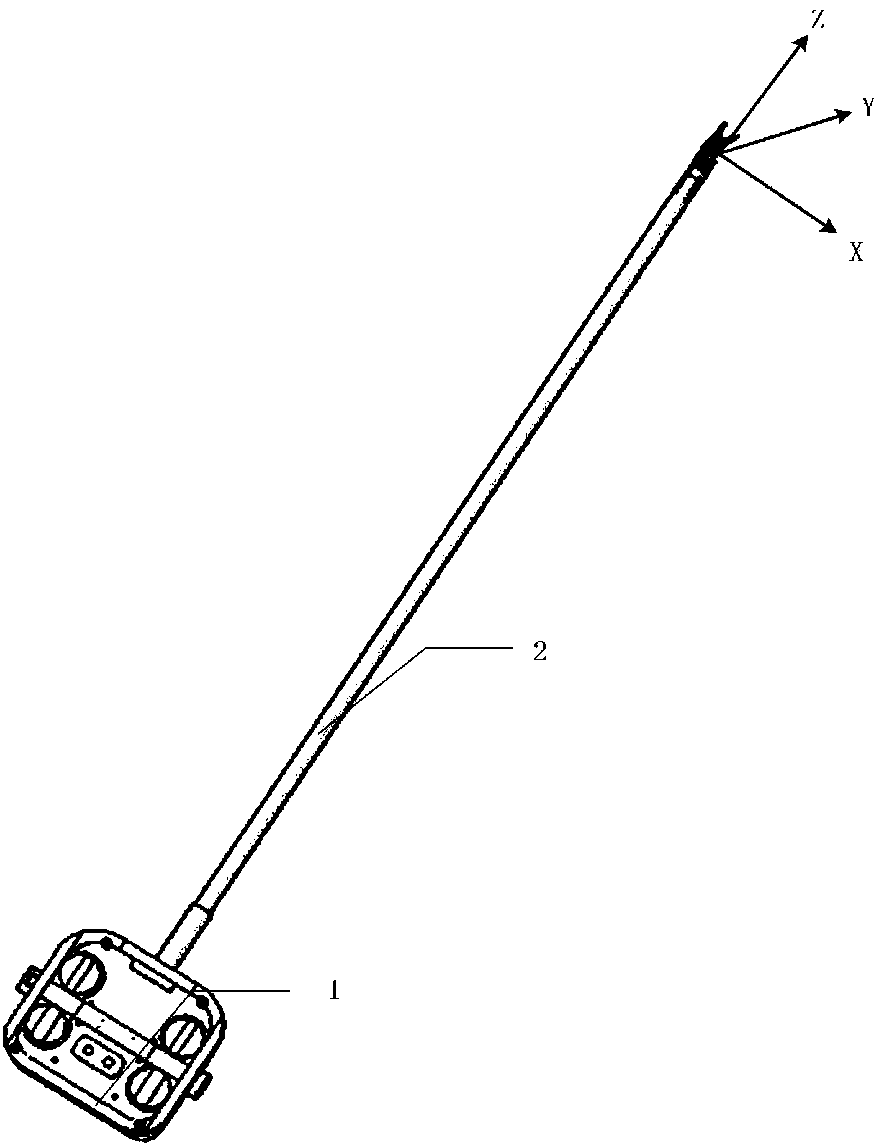
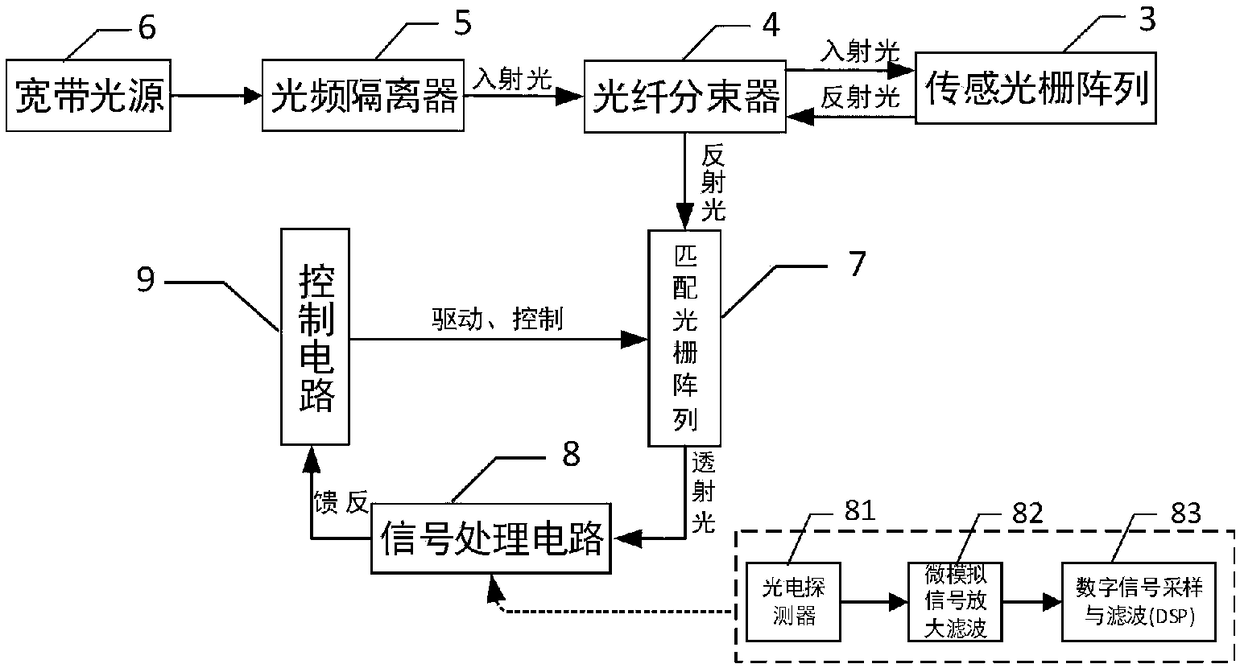
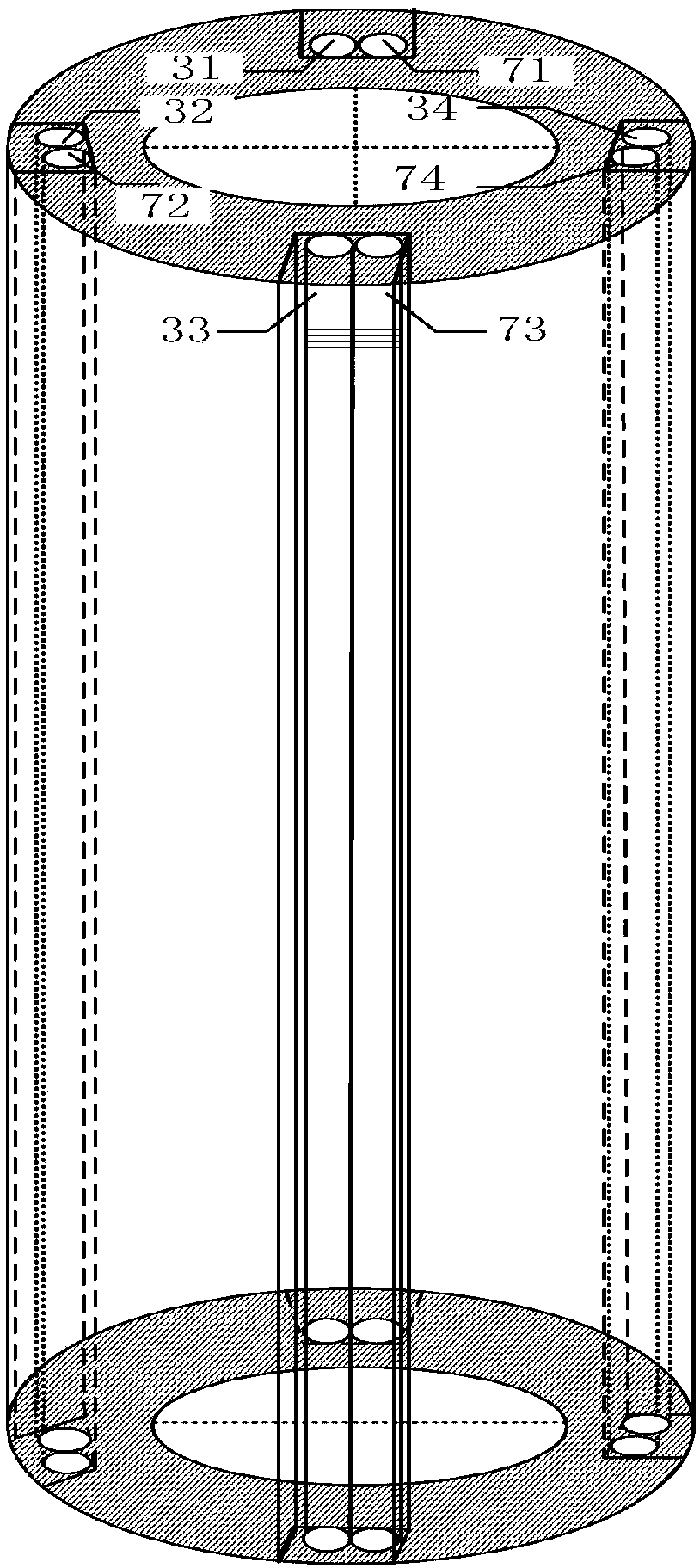
The invention provides a minimally-invasive-surgery-robot three-dimensional force sensor based on fiber gratings. The minimally-invasive-surgery-robot three-dimensional force sensor is mainly formed by four pairs of fiber bragg gratings, and the four pairs of fiber bragg gratings are fixed in a groove in the circumferential direction of the outer wall of a hollow-glass-fiber round bar; fibers transmit light signals to a signal processing module, and digital signals of stress are led out through the connecting end of a mechanical arm. A light path of the three-dimensional force sensor is that light emitted by a broadband light source enters sensing fiber gratings through a light frequency isolator and a fiber beam splitter in sequence, reflected light of the gratings is transmitted to a signal processing circuit through the fiber beam splitter and transmission of matching gratings in sequence, the light signals are processed to be transmitted to a control circuit, the central wavelengthof the sensing fiber gratings is reversely inferred by measuring driving signals of the circuit, and the digital signals of the stress are thus obtained. In addition, for the three-dimensional forceinformation coupling phenomenon, static decoupling of three-dimensional force information is achieved through the corresponding algorithm. The minimally-invasive-surgery-robot three-dimensional forcesensor based on the fiber gratings is simple in structure and high in accuracy, is not influenced by electromagnetic interference, and is easy to process and low in cost.
Description
technical field [0001] The invention belongs to the technical field of minimally invasive surgical robots, and in particular relates to a three-dimensional force sensor for a minimally invasive surgical robot based on an optical fiber Bragg grating. Background technique [0002] In recent years, robots have been widely used in assisting surgical operations, but the existing robotic systems for minimally invasive surgery generally lack force sensory information feedback. The force detection and force feedback technology of robot-assisted minimally invasive surgery enables the system to have on-the-spot force perception capabilities, enabling the operator to feel the interaction between the surgical instrument and the patient's tissue in real time, improving the surgeon's surgical skills and improving the surgical performance. quality. [0003] The basic process of realizing the force feedback function in a minimally invasive surgical robot is: first, the sensor array install...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More Application Information
Patent Timeline
 Login to View More
Login to View More Patent Type & AuthorityApplications(China)
IPC IPC(8): G01L1/24G01L5/22
CPCG01L1/246G01L5/228
Inventor代煜孙会娇张建勋
OwnerNANKAI UNIV