Multi-unmanned-aerial-vehicle communication relay platform collaborative autonomous layout method
A multi-UAV and communication relay technology, applied in the field of UAV, can solve problems such as difficulty in finding the optimal solution, and achieve the effects of fast and efficient deployment, wide application range, and improved real-time performance and effectiveness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0023] The technical solutions in the embodiments of the present invention will be clearly and completely described below in conjunction with the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only a part of the embodiments of the present invention, rather than all the embodiments. Based on the embodiments of the present invention, all other embodiments obtained by those of ordinary skill in the art without creative work shall fall within the protection scope of the present invention.
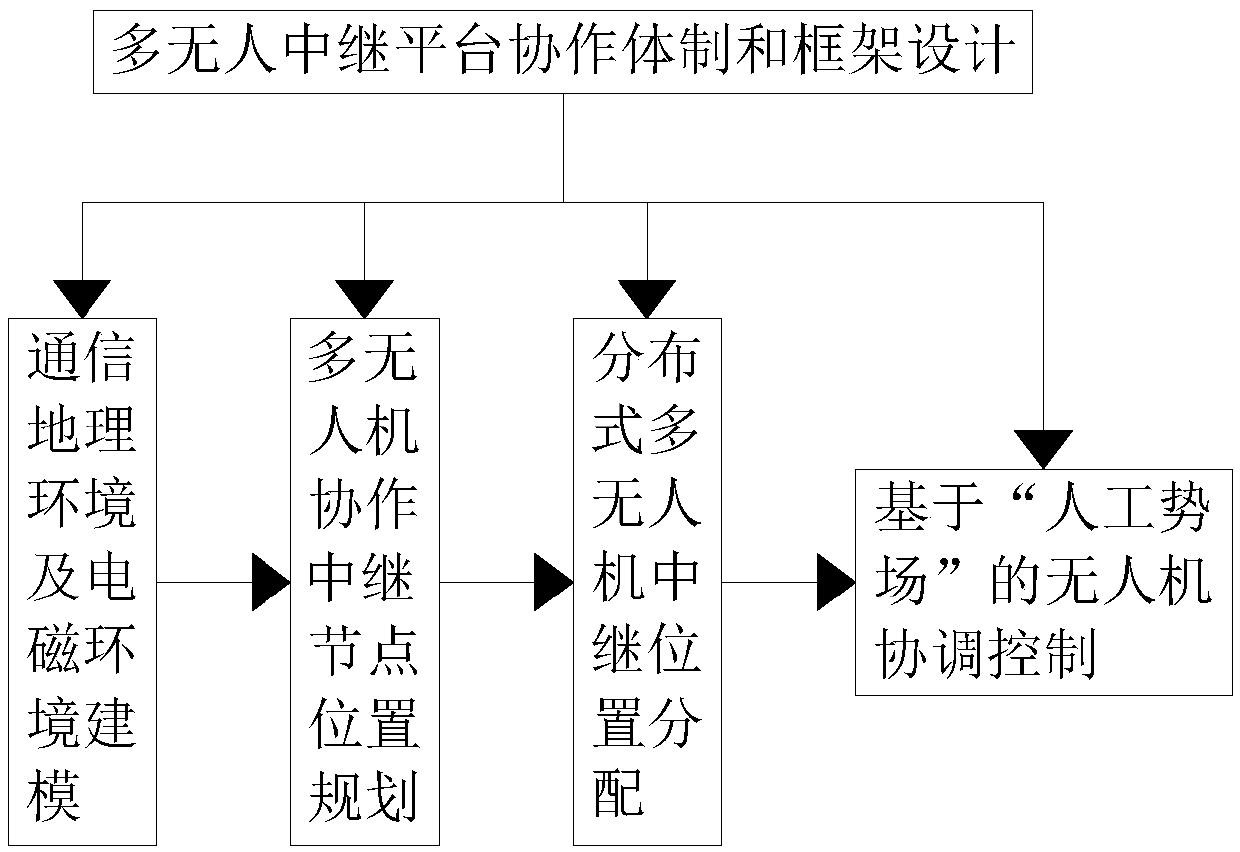
[0024] See figure 1 , A collaborative autonomous deployment method for multiple drone communication relay platforms, the method includes the following steps:
[0025] A. Design of coordination system and framework for multiple unmanned relay platforms;
[0026] B. Modeling of communication geographic environment and communication electromagnetic environment;
[0027] C. Multi-UAV cooperative relay node location planning;
[0028] D. Distribu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More