

Compliant mechanism spatial configuration topological optimization method
A topology optimization, compliant mechanism technology, applied in design optimization/simulation, instrumentation, geometric CAD, etc., can solve problems such as splitting coupling characteristics, affecting applications, ignoring invariance, etc., to achieve the effect of improving the ability of vibration suppression
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
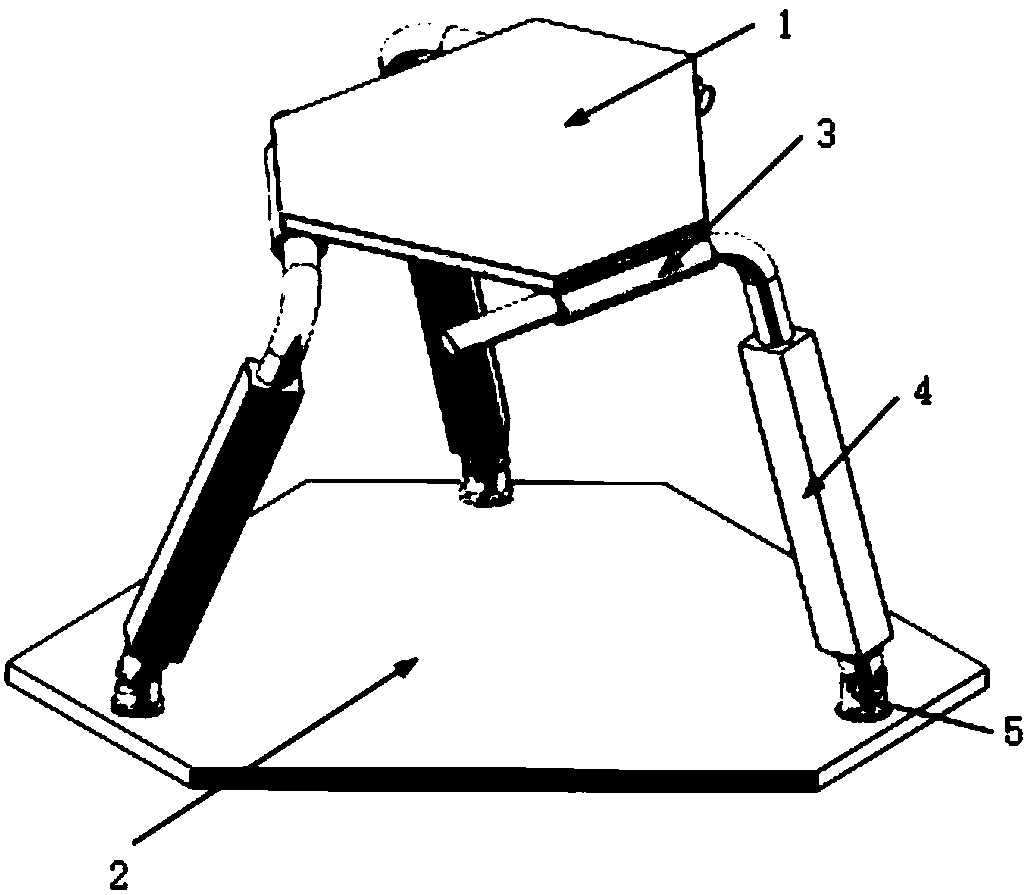
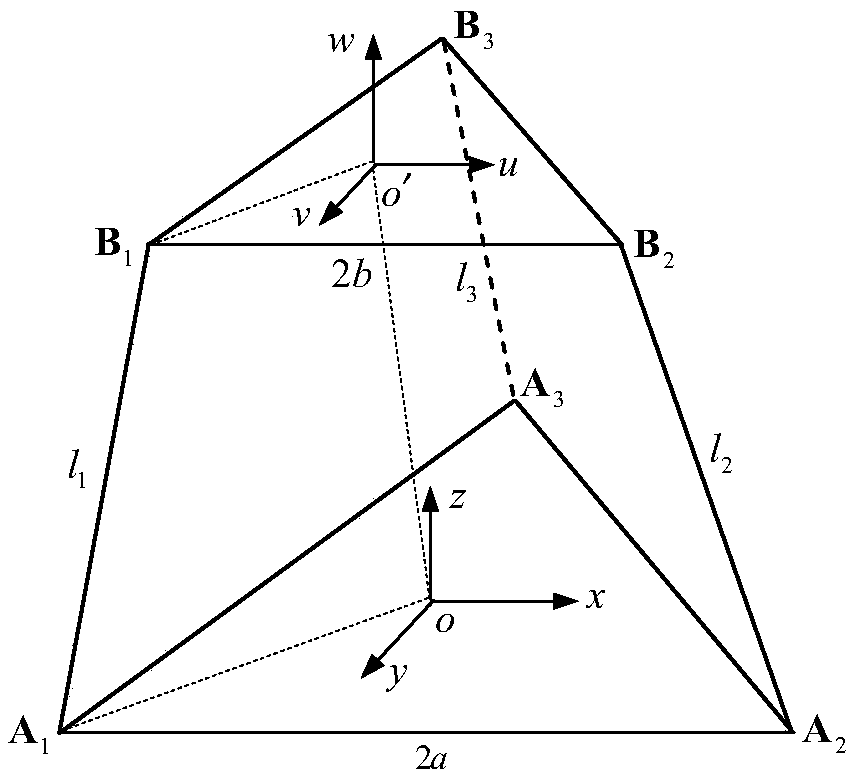
[0066] Embodiment 1 of the present invention provides a topology optimization method for the spatial configuration of a compliant mechanism. In this embodiment, a 3-UPU type parallel mechanism with spatial three-translational motion characteristics is selected as the pseudo-rigid body model corresponding to the designed spatial compliant mechanism , and optimize its structural parameters. The 3-UPU parallel mechanism is composed of three symmetrical kinematic branch chains, a moving platform and a fixed platform. The platform is composed of two Hooke hinges through a moving hinge, and the structure diagram of the 3-UPU parallel mechanism is shown in the attached figure 1 As shown, it consists of a moving platform 1, a fixed platform 2, a cylindrical kinematic pair 3, a moving kinematic pair 4 and a Hooke hinge kinematic pair 5. The fixed platform 2 remains stationary to provide support for the overall mechanism, and the motion is controlled by the moving pair 4 Provide the dri...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More