

All-dimension ground physical verification system and method for space manipulator load changing situation
A space manipulator, physical verification technology, applied in the field of space robot ground test verification, to achieve the effect of increasing applicability, wide adaptability, and strong load capacity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
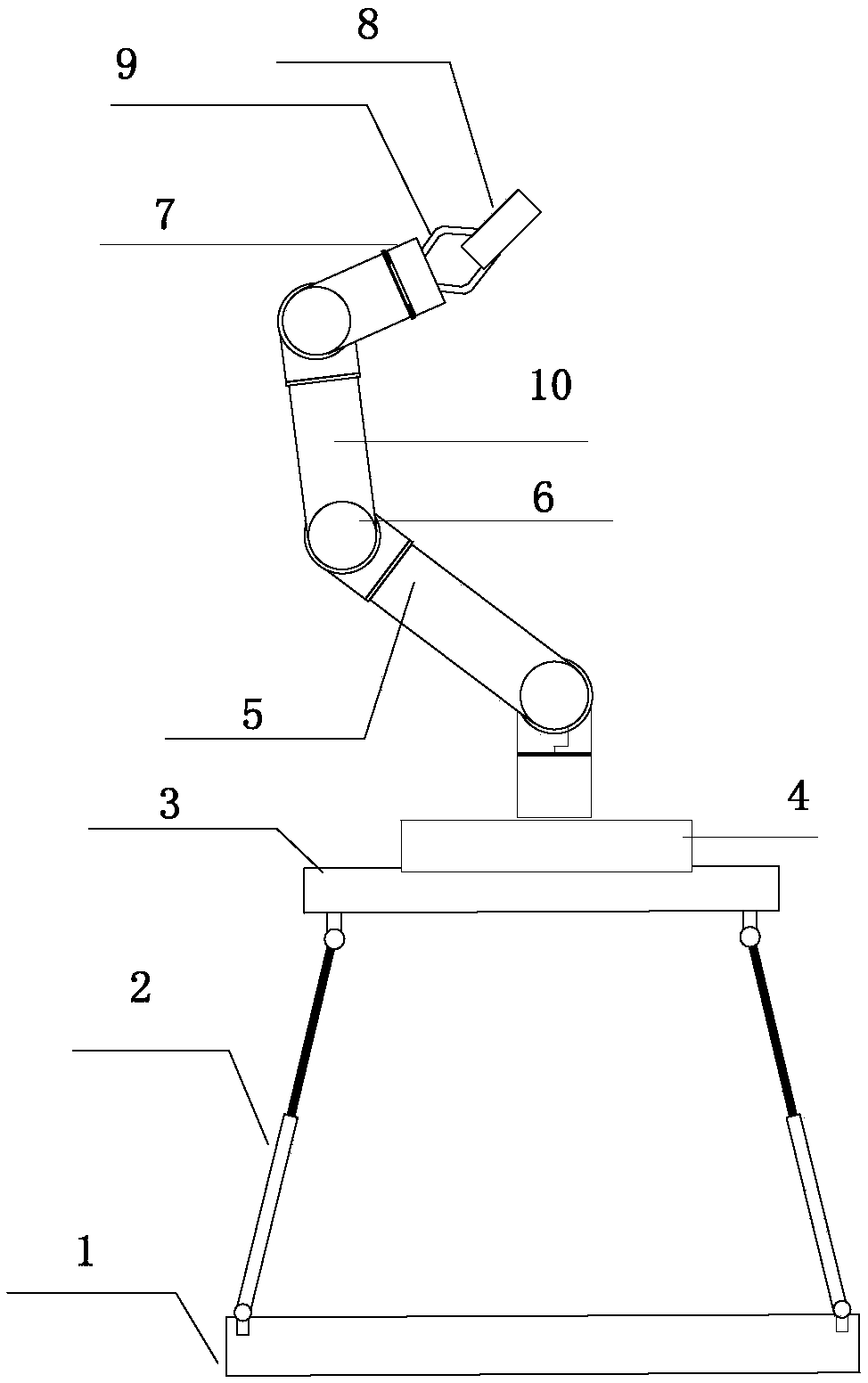
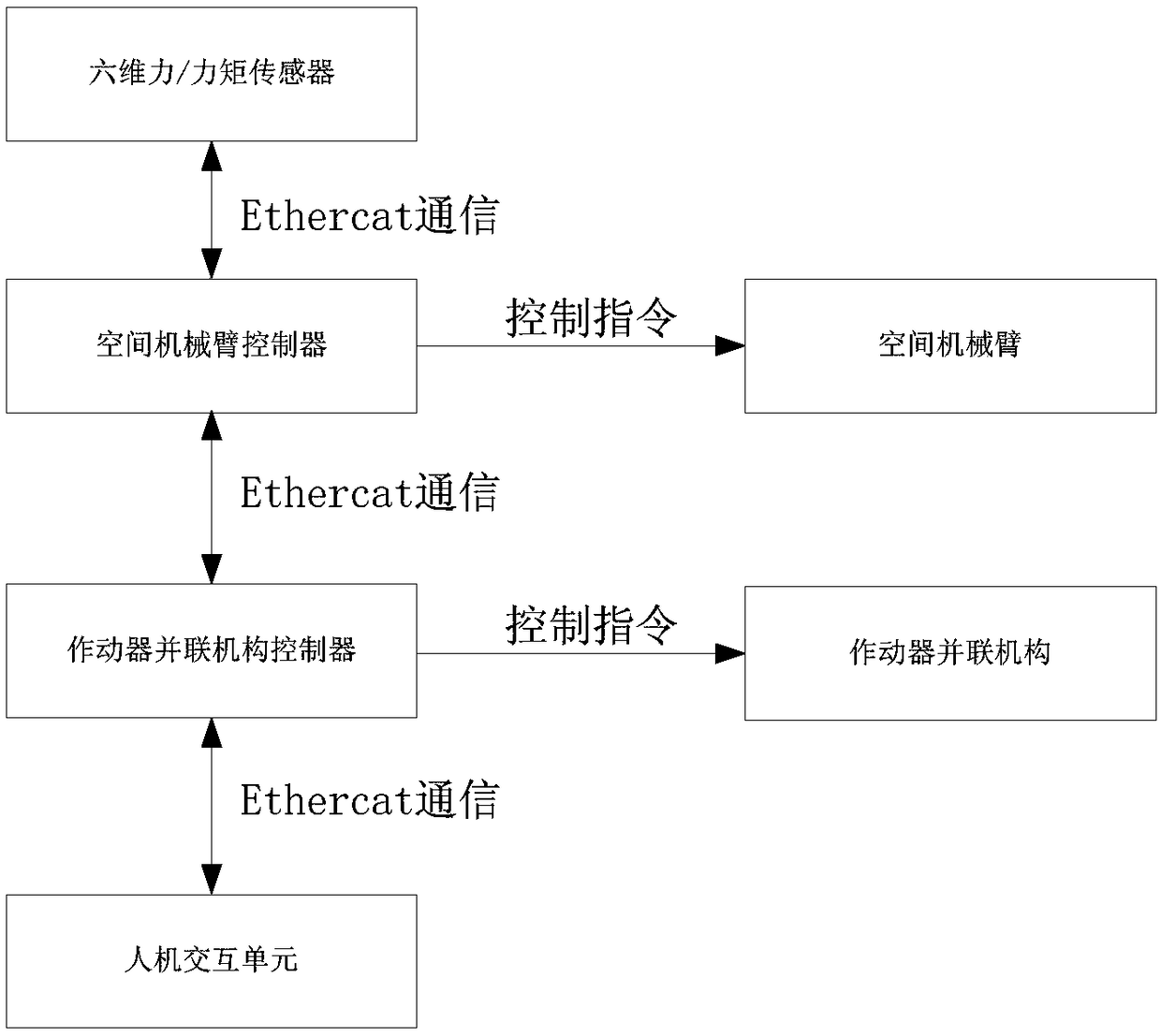
[0034] Such as figure 2 , the space robot ground physical verification system under variable load conditions includes a human-computer interaction unit, an actuator parallel mechanism 2, an actuator parallel mechanism controller, a six-dimensional force / torque sensor 7, a six-dimensional force / torque sensor signal processing module, and a six-dimensional force / torque sensor. Degree of freedom space manipulator 5, space manipulator controller, load clamping mechanism 9 and load.
[0035] Such as figure 1 , The actuator parallel mechanism is composed of upper platform 3, lower platform 1, six telescopic cylinders and Hooke hinge. One end of the telescopic cylinder is connected to the upper platform 3 through a Hooke hinge, and the other end is connected to the lower platform 1 through a Hooke hinge.
[0036] The signal processing module of the six-dimensional force / torque sensor 7 includes a force / torque signal filtering module and a communication module.
[0037] The space ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More