

Sliding mode attitude control method for quadrotor UAV based on proportional integral observer
A quadrotor UAV, proportional integral technology, applied in attitude control, adaptive control, general control system and other directions, can solve the problems of high computational complexity, large amount of state feedback, etc. Interference, eliminate the influence of disturbance, easy to popularize and apply
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
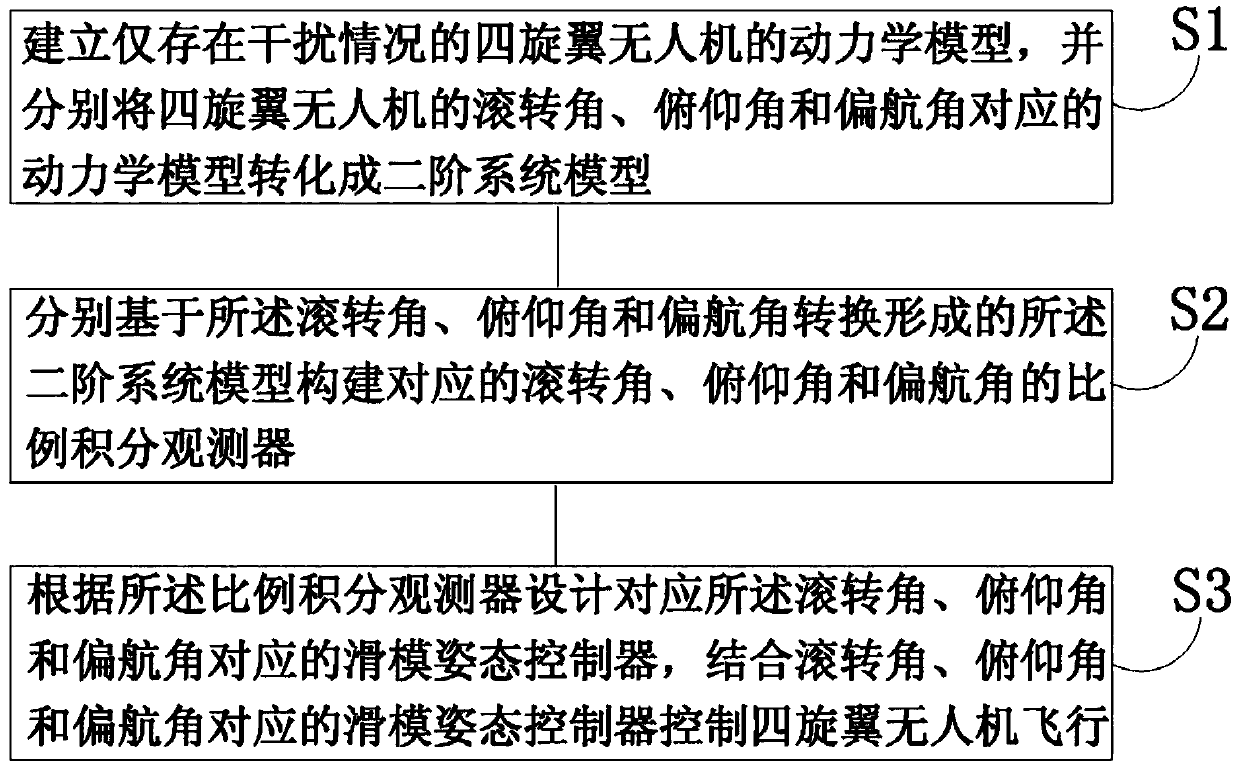
[0034] In the embodiment of the present invention, a sliding mode attitude control method for a quadrotor UAV based on a proportional integral observer is provided, which is suitable for the attitude angle of a quadrotor UAV less than or equal to 90°, by using the Euler angle way to describe the space body attitude of the quadrotor UAV and model it; refer to figure 1 , the method of the present invention comprises:
[0035] S1. Let the Euler angle vectors rotate around the X, Y, and Z axes to x, y, and z be [φ θ ψ] to perform spatial rotation changes in the order of the X, Y, and Z axes respectively; where φ is the roll angle, that is The angle the body has rotated around its own X-axis; θ is the pitch angle, that is, the angle that the body has rotated around its own Y-axis; ψ is the yaw angle, that is, the angle that the body coordinate system has rotated around its own Z-axis; The movement of the aircraft is regarded as a rigid body motion, and the center of the quadrotor ...
Embodiment 2
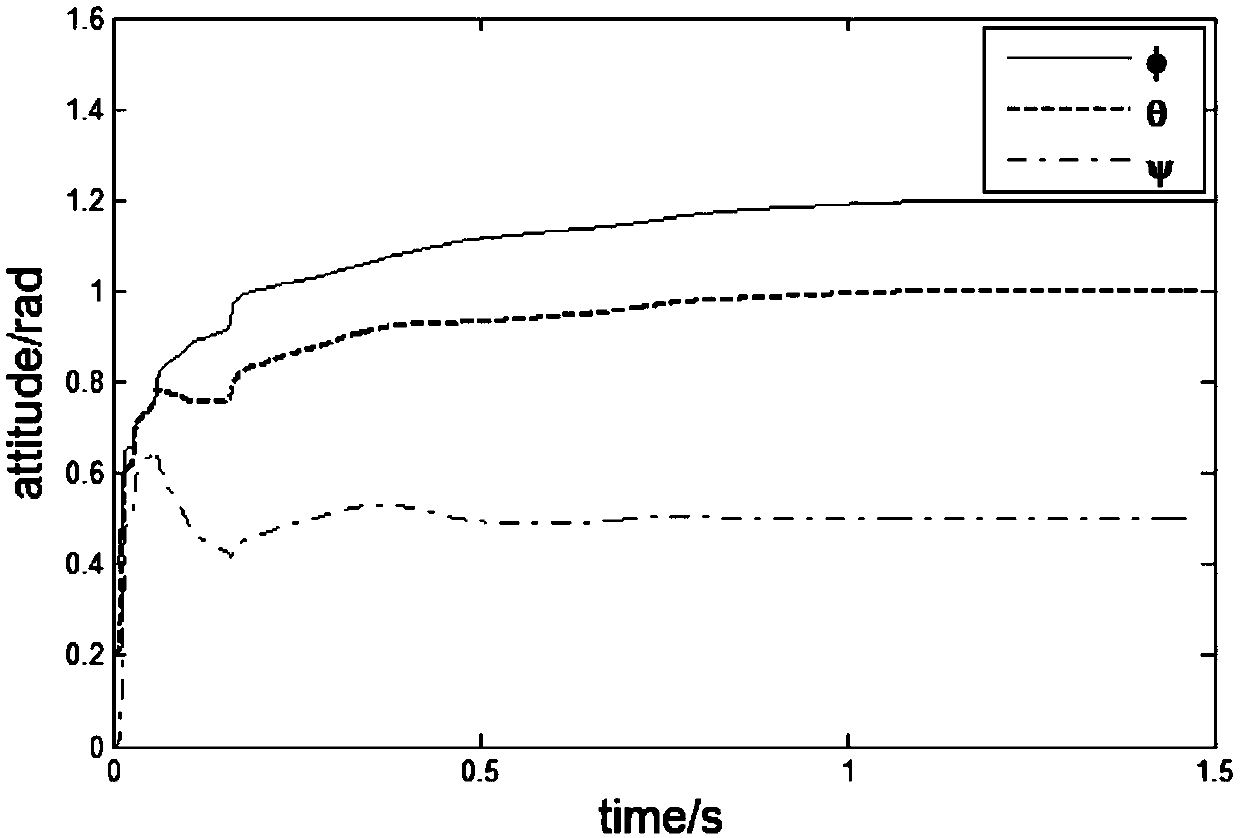
[0058] refer to Figure 3 ~ Figure 9 , under the environment of MATLAB2016, the four-rotor UAV is selected to carry out the simulation verification test of the sliding mode control method based on the proportional integral observer designed by the present invention:
[0059] First, build a simulation module in MATLAB to carry out the simulation experiment of the whole quadrotor UAV. The relevant parameters of the model used by the quadrotor UAV and the related parameters of the proportional integral observer are:
[0060]
[0061] The initial state of the system state variable is: the initial Euler angle is (0.4,0.2,0) rad; the expected Euler angle is (1.2,1,0.5) rad. The initial Euler angular velocity is (0,0,0)rad / s.
[0062] In the present invention, the parameters of the sliding mode controller designed based on the proportional integral observer have a direct impact on the performance of the flight control system; the larger the parameter value is, the stronger the co...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More