

Permanent magnet synchronous motor rotor location full-order sliding mode observation device and method
A technology of permanent magnet synchronous motor and full-order sliding mode, which is applied in the control of electromechanical transmission, control of generators, motor generator control, etc. Occupying DSP and other issues
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
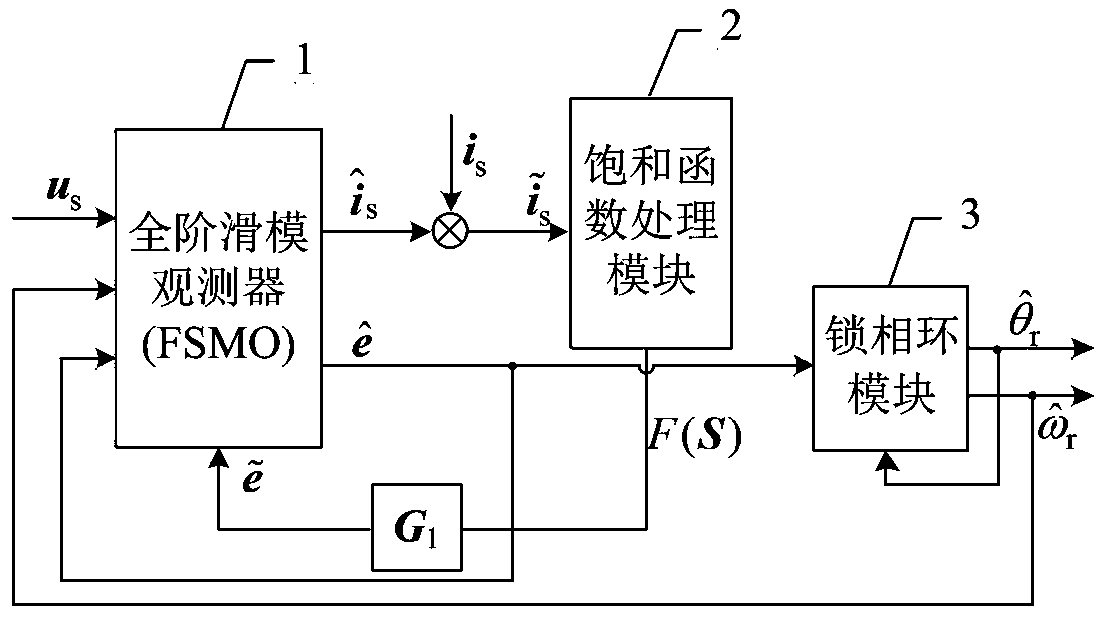
[0043] Such as figure 1 with figure 2 As shown, a permanent magnet synchronous motor rotor position full-order sliding mode observation device, the device includes a full-order sliding mode observer 1, a saturation function processing module 2 and a phase-locked loop module 3;
[0044] The full-order sliding mode observer 1 is provided with the stator voltage u in two-phase static coordinates s Input terminal, rotor speed observation value Observation error of back EMF in input terminal and two-phase stationary coordinate system input terminal;
[0045] The stator current observation value of the full-order sliding mode observer 1 Output terminal and stator current value i s After making a difference, the sliding mode function control vector F (S) under the permanent magnet synchronous motor two-phase stationary coordinate system is output through the saturation function processing module 2; the sliding mode function control vector F (S) is passed through the sliding ...
Embodiment 2
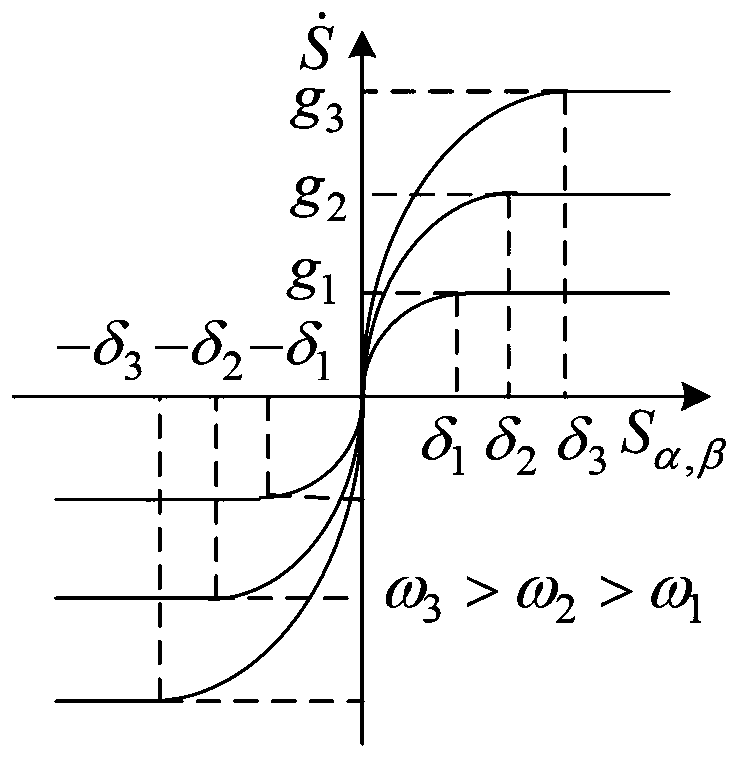
[0075] Combine below figure 2 This embodiment is described. This embodiment is a further description of the full-order sliding mode observation method for the rotor position of the permanent magnet synchronous motor described in the first embodiment. In step 3, the sliding mode function control vector F (S) is passed through the sliding mode gain matrix G 1 The rear boundary layer changes in the form of figure 2 As shown, the observation error of the back electromotive force in the two-phase stationary coordinate system The expression is
[0076]
Embodiment 3
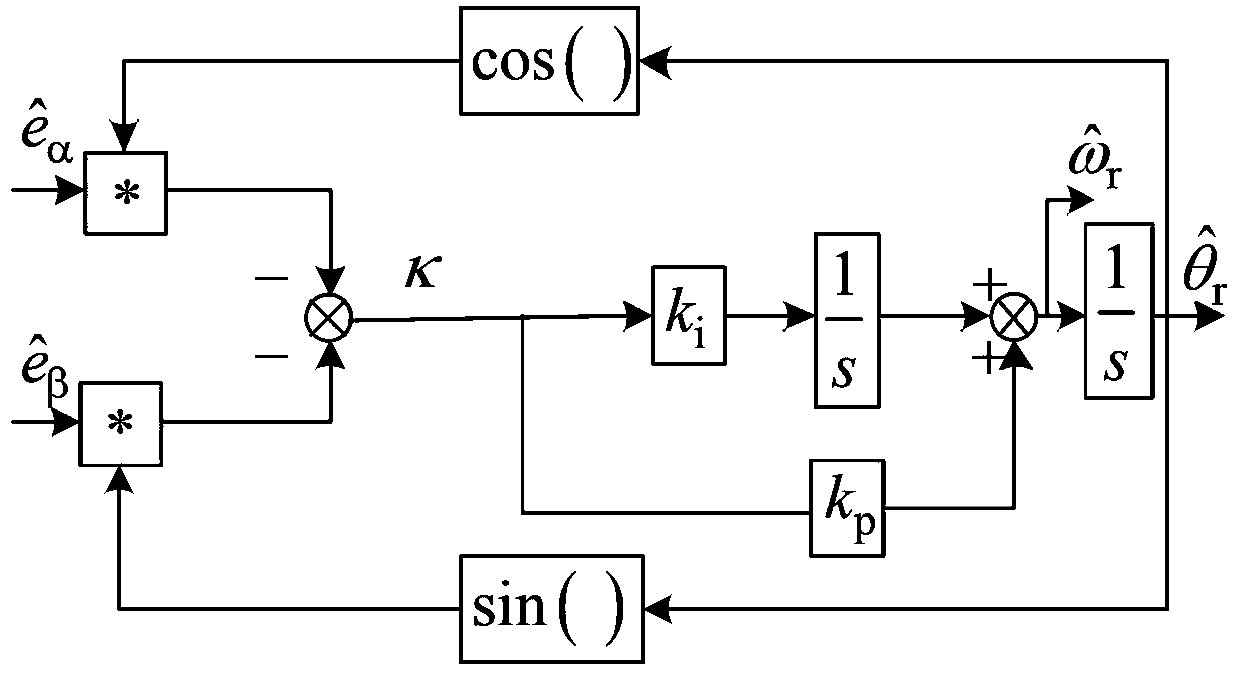
[0078] Combine below image 3 Describe this embodiment. This embodiment is a further description of the full-order sliding mode observation method for the rotor position of a permanent magnet synchronous motor described in Embodiment 1. The working principle of the phase-locked loop module in step 5 is as follows image 3 As shown, its working process is:
[0079] Step 51, Observing the rotor position of the permanent magnet synchronous motor After the cosine operation and the observed value of the α-axis back electromotive force multiplied, ie Observation of rotor position of permanent magnet synchronous motor After the sine operation and the observed value of the β-axis back electromotive force multiplied, ie
[0080] Step 52, for the obtained in step 51 with Perform heterodyne calculation to get the rotor position error signal κ of the permanent magnet synchronous motor after heterodyne processing
[0081]
[0082] Step 53: After the rotor position error ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More