Moving double-robot cooperative grinding device and method based on online thickness detection
A dual-robot, mobile technology, applied in the direction of grinding machines, manipulators, grinding workpiece supports, etc., can solve problems such as complex structures, inability to process openness, poor workpieces, etc., and achieve the effect of improving positioning and processing accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] The present invention will be further described below in conjunction with accompanying drawing.
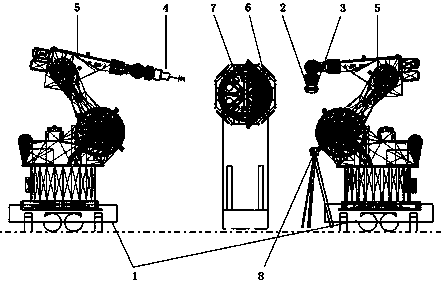
[0039] The invention provides a mobile dual-robot collaborative grinding device based on online thickness detection, the structure is as follows figure 1 As shown, it includes a free-moving platform 1, an industrial robot 5, a rotary tool 6 and a laser tracker 8, wherein the target ball 7 is installed on the rotary tool 6, and two free-moving platforms 1 and a laser tracker 8 are distributed on the rotary tool 6. All around, each free-moving platform 1 is equipped with an end effector through an industrial robot 5; the end-effector on one of the free-moving platforms 1 is a floating constant force grinding electric spindle 4, and the other free-moving platform 1 is equipped with a dual Eye vision 2 and electromagnetic thickness gauge 3.
[0040] The free-moving platform 1 is equipped with a visual recognition device around the bottom, and realizes high-precision positionin...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com