Thermal expansion fluid composite spherically-shaped cavity drive type robot soft hand
A thermal expansion, robotic technology, applied in the directions of manipulators, program-controlled manipulators, chucks, etc., can solve the problems of limited degrees of freedom, poor operational safety, and insufficient ability to stably and reliably grasp complex-shaped objects.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
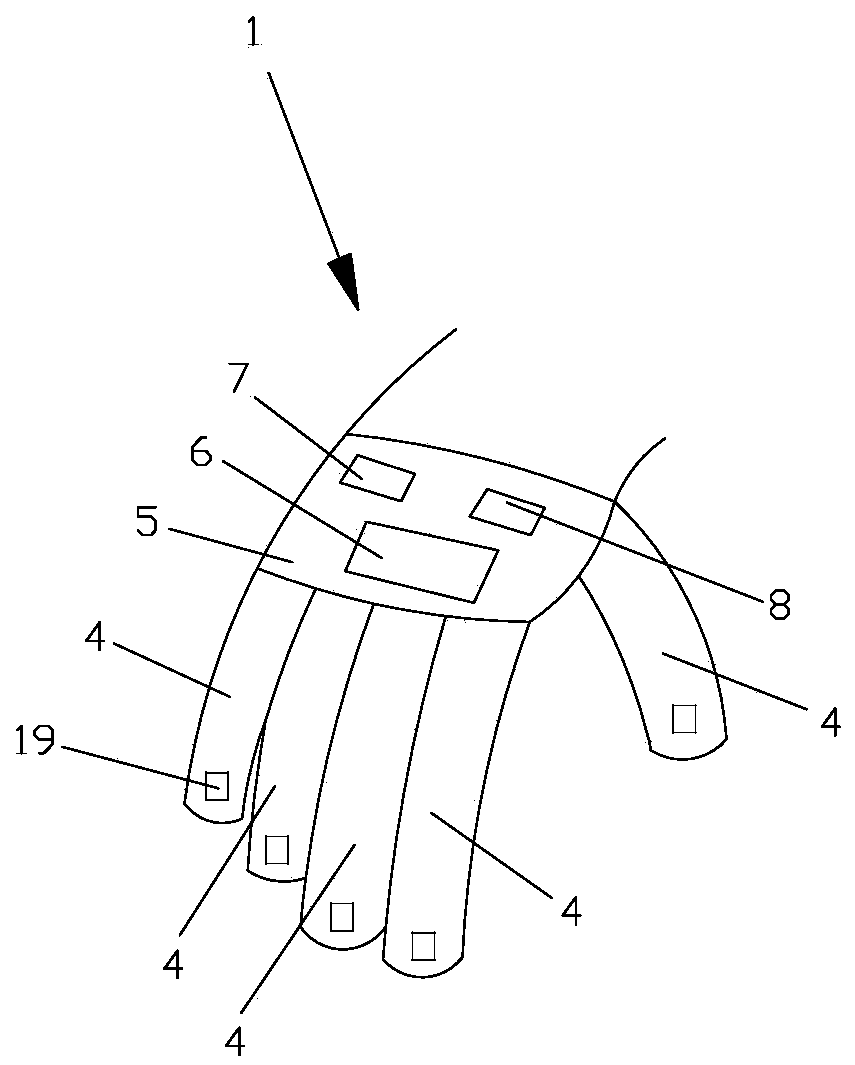
[0044] Embodiment 1: A thermal expansion fluid composite special-shaped cavity driven robot soft hand 1 using a thermal expansion fluid and a shape memory alloy composite special-shaped cavity unilateral driver 2.
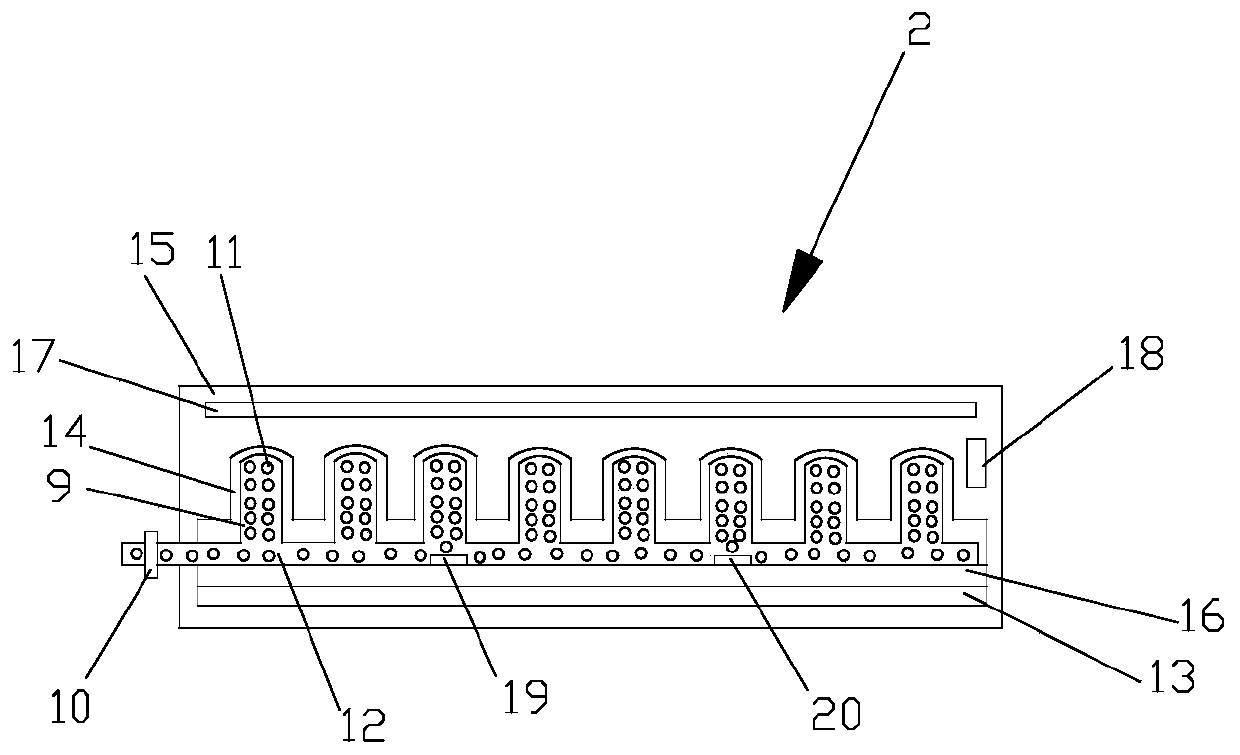
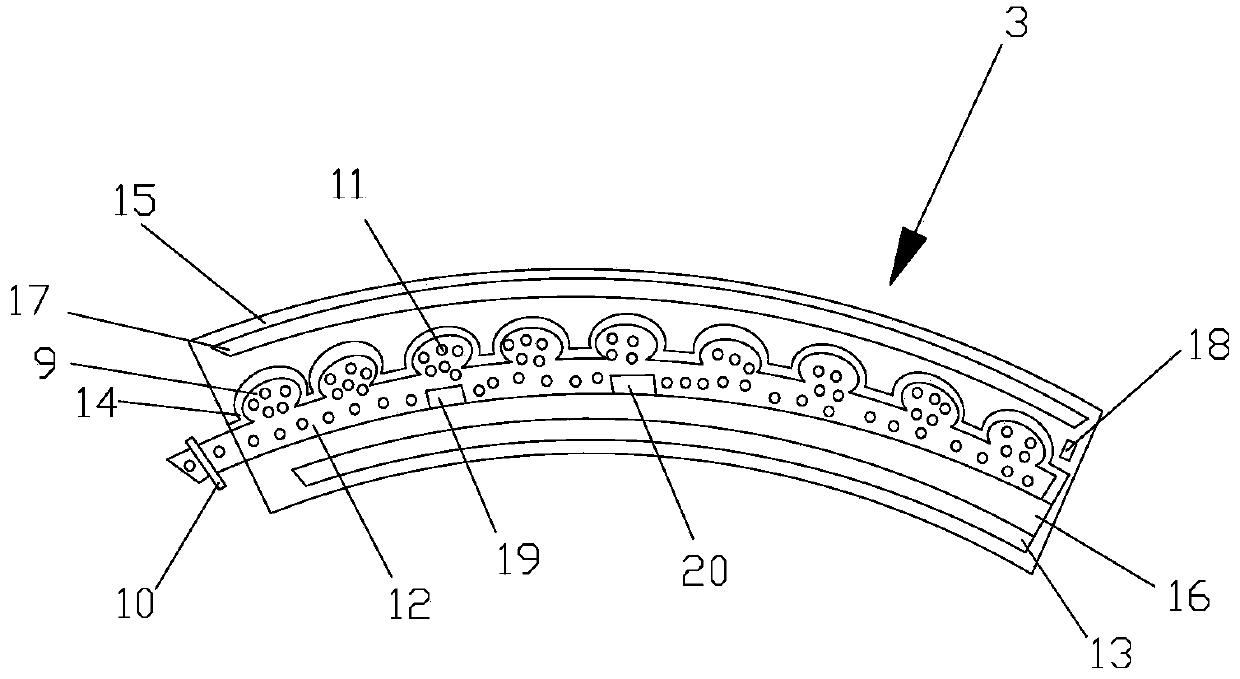
[0045] Example 1 of the present invention adopts a thermal expansion fluid and a shape memory alloy composite special-shaped cavity unilateral driver 2 for the structure diagram of the thermal expansion fluid composite special-shaped cavity-driven robotic soft hand 1 figure 1 ;The structure diagram of the undriven state of the unilateral actuator of the thermal expansion fluid and shape memory alloy composite special-shaped cavity is shown in figure 2 ; The structure diagram of the single-side driver driving state 3 of the thermal expansion fluid and shape memory alloy composite special-shaped cavity is shown in image 3 .
[0046] The thermal expansion fluid composite special-shaped cavity-driven robotic soft hand 1 of embodiment 1 of the present invention includes: fiv...
Embodiment 2
[0053] Embodiment 2: The thermal expansion fluid composite special-shaped cavity driven robot soft hand 1 using the double-sided driver 21 of the composite special-shaped cavity with thermal expansion fluid and electric heating material.
[0054] Embodiment 2 of the present invention adopts a thermal expansion fluid and an electrically controlled heating material to composite a special-shaped cavity double-side driver for a structural schematic diagram of a thermal expansion fluid composite special-shaped cavity driven robot soft hand 1 figure 1 ; The schematic diagram of the structure of the double-sided actuator 21 of the composite special-shaped cavity of the thermal expansion fluid and the electric control heating material is shown in Figure 4 .
[0055] The thermal expansion fluid composite special-shaped cavity-driven robot soft hand 1 of the second embodiment of the present invention includes: five thermal expansion fluid composite special-shaped cavity-driven robot soft fin...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com