

Rapid terminal sliding mode adaptive control system and method of quadrotor unmanned aerial vehicle
A quadrotor UAV, adaptive control technology, applied in the direction of adaptive control, general control system, control/regulation system, etc. Improved flight control performance, enhanced robustness, and fast response
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0017] The technical solution of the present invention will be further described in detail below in conjunction with the accompanying drawings.
[0018] The hardware platform of the present invention adopts an X-shaped four-axis structure, and the flight control adopts PIXHAWK. Based on an open-source flight control platform, the control algorithm of the present invention is written.
[0019] The hardware platform includes a four-axis frame, a brushless motor, an electric regulator, a battery, a propeller, a propeller cover, a remote control receiver, and a digital transmission. The flight control system includes a central processing unit, necessary sensors, such as compass, barometer, accelerometer, gyroscope, GPS, etc.
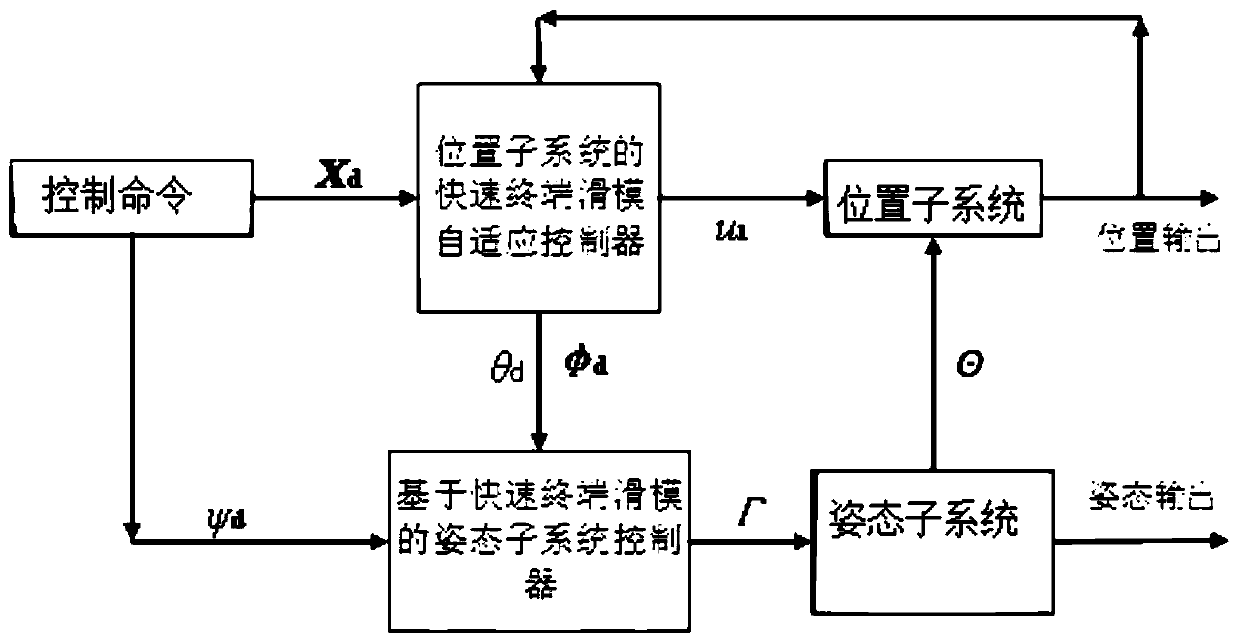
[0020] figure 1 As the block diagram of the control algorithm, the inner and outer loop structure is adopted. The outer loop is the position subsystem controller. The algorithm is based on adaptive fast terminal sliding mode control. The output position co...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More