

Mobile robot positioning method based on RGB-D camera and IMU information fusion
A mobile robot and positioning method technology, which is applied in the directions of instruments, surveying and navigation, measuring devices, etc., can solve the problems of divergent pose, positioning accuracy only at the decimeter level, and large volume, and achieves good dynamic characteristics and real-time performance. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
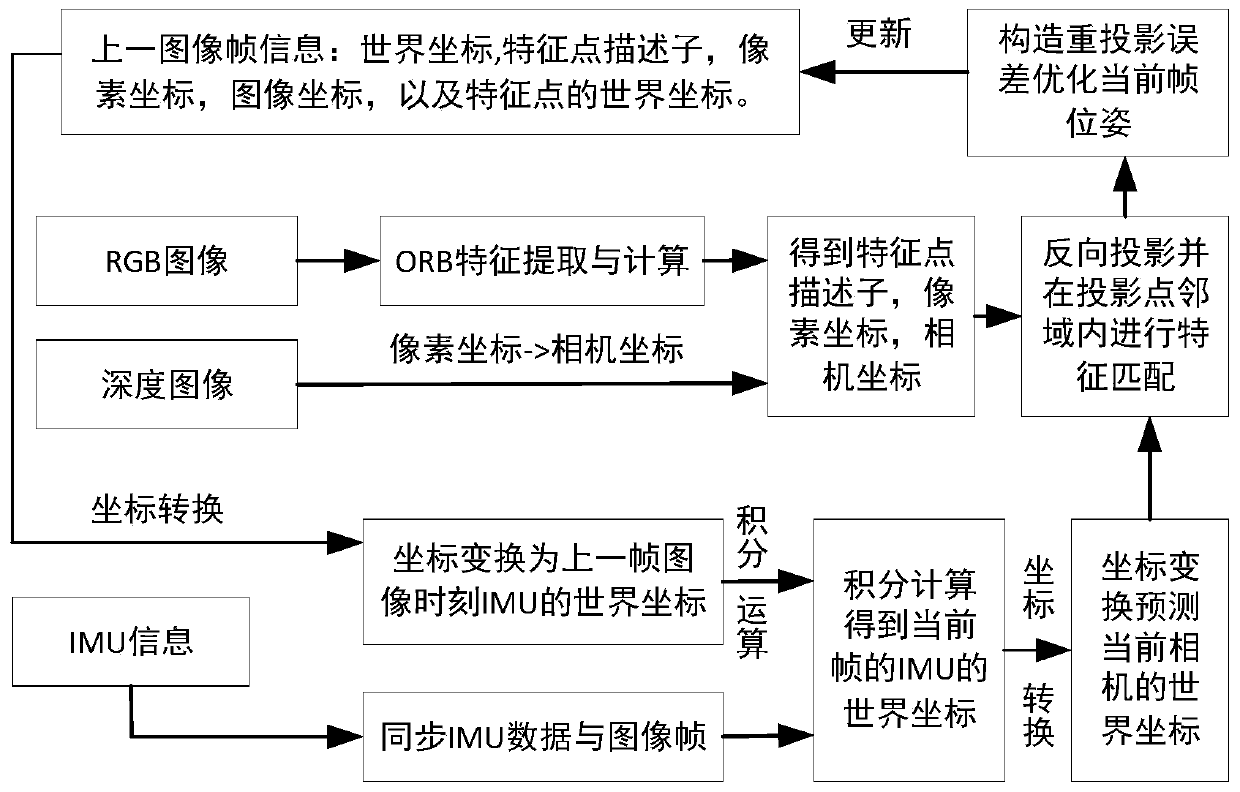
[0048] Such as figure 1 As shown, the present embodiment is based on the method for positioning a mobile robot fused with an RGB-D camera and an IMU, and the specific real-time steps are as follows:
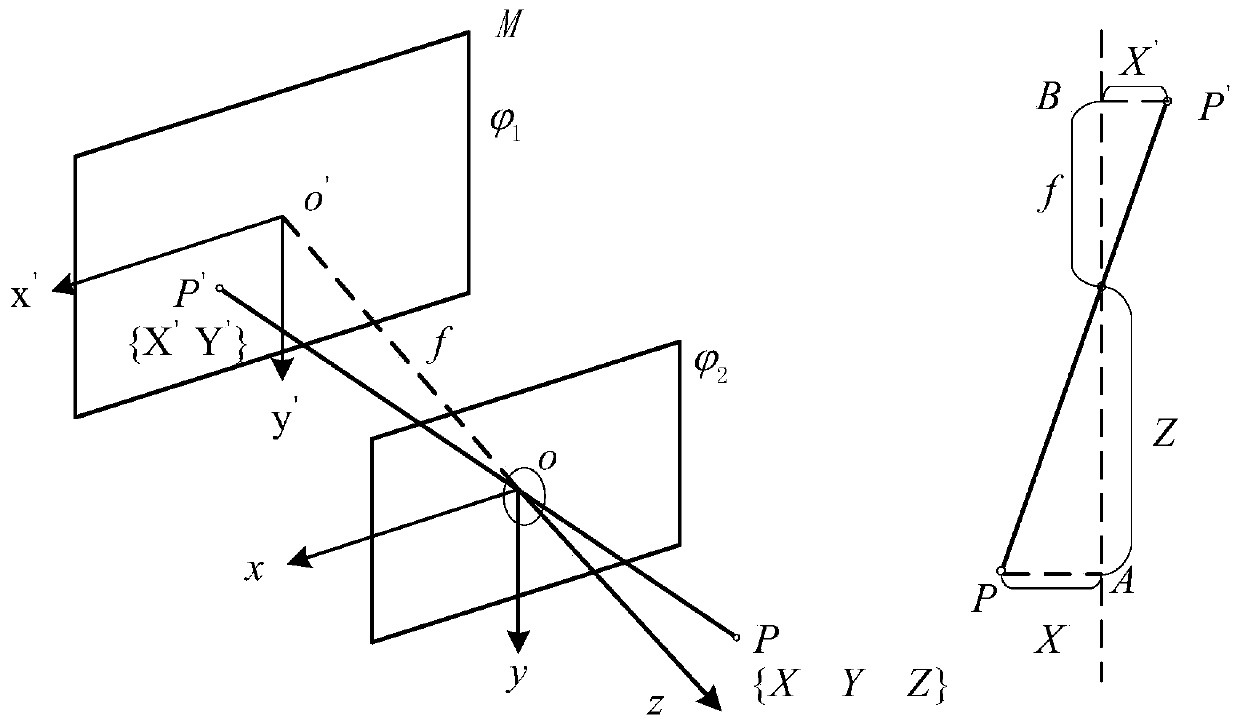
[0049] Step (1): Establish a pinhole camera model.
[0050] consider as figure 2 The pinhole camera model shown, where The plane is the imaging plane, The plane is the camera plane. Among them, xyz is the camera coordinate, the z axis in the camera coordinate is perpendicular to the camera plane, and the xy axis is parallel to the two borders of the camera and forms a right-handed coordinate system with the z axis. The plane coordinate system x'y' is parallel to the xy axis respectively. o is the optical center of the camera, o' is the intersection point of the straight line passing through the optical center parallel to the z-axis and the imaging plane α, oo' is the focal length, and its size is f. Assuming that the coordinates of a point P in the three-dimensional spac...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More