Robust monocular vision SLAM method suitable for shadow environment
A monocular vision and shadow technology, applied in the field of computer vision, can solve the problems of low shadow robustness, operation interruption, and accuracy decline, and achieve high-precision effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0039] The present invention will be described in further detail below in conjunction with the accompanying drawings and specific embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
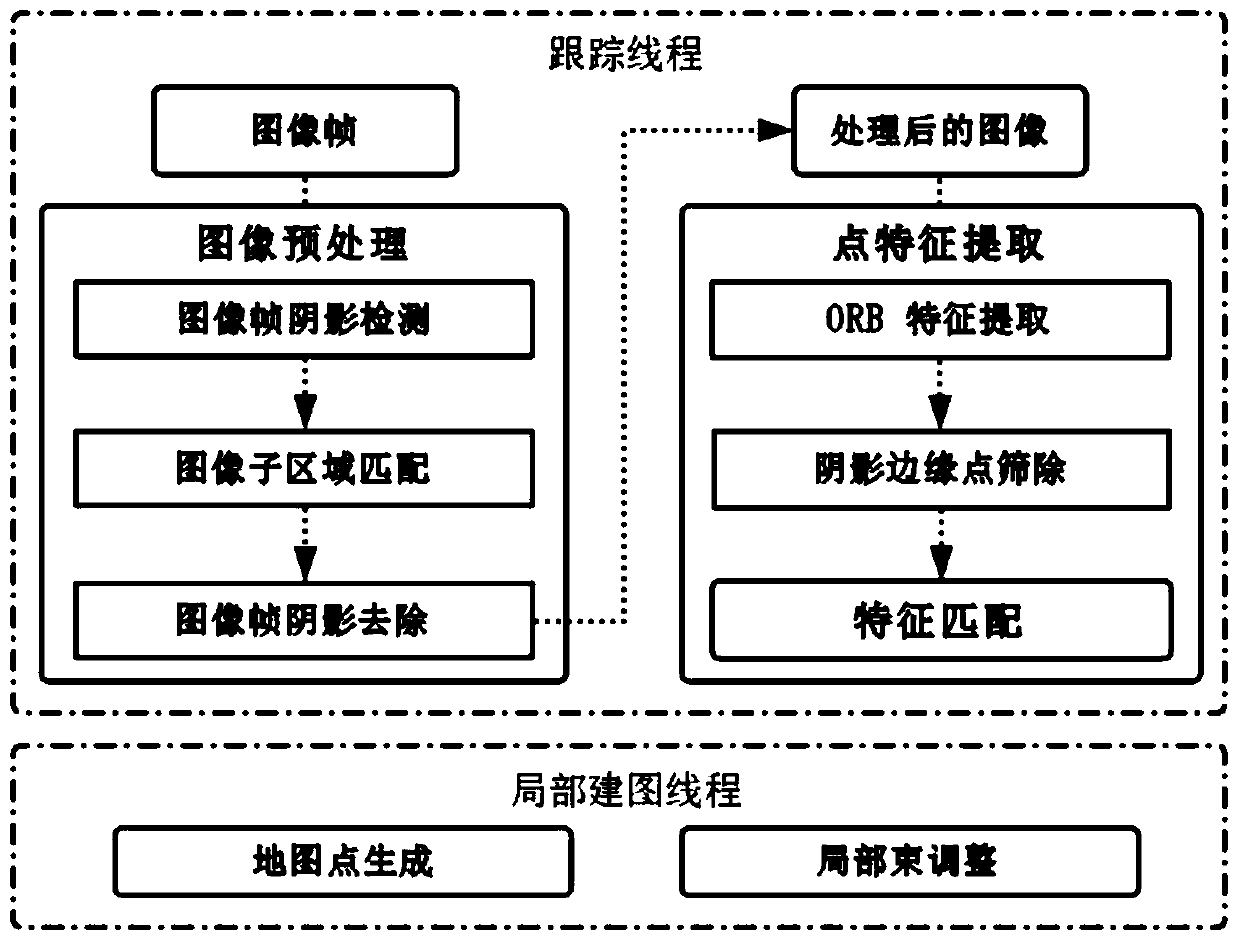
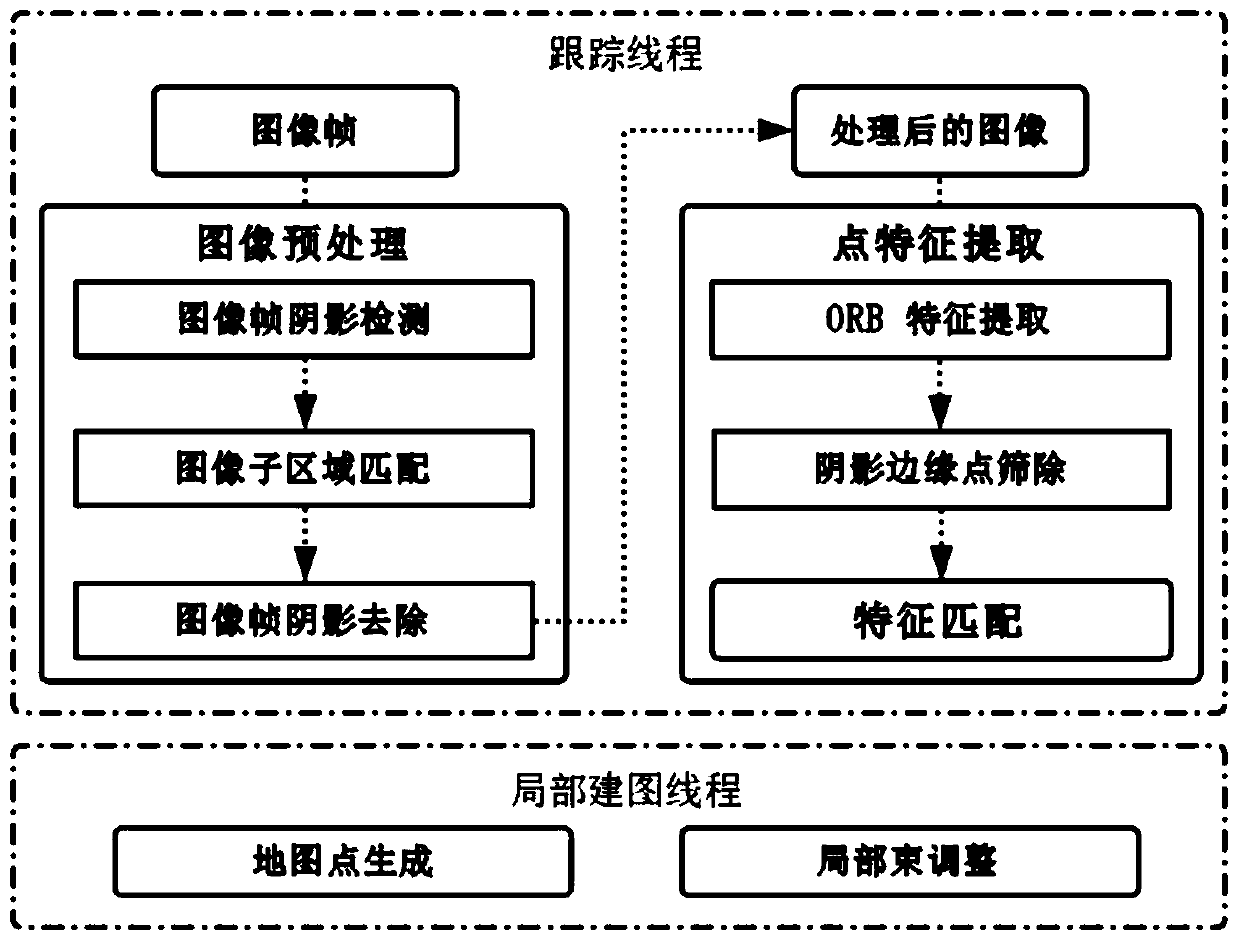
[0040] A robust SLAM method applicable to various shaded environments in the present invention is described in detail. Such as figure 1 As shown, the specific steps include:
[0041] 1. Realize the preprocessing of image frames
[0042] For the image frame acquired by the visual front-end, first use the Canny operator to detect the edge of the image frame, calculate the continuous edge in the image, and divide the image frame into roughly the foreground area and the background area. Calculate the brightness intensity ratio, hue, and color saturation difference between the foreground area and the background area in the image frame, and finally establish the corresponding HSI color m...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More