Industrial robot kinematics parameter calibration system and method with robust capacity
A technology of robot kinematics and industrial robots, applied in the field of robotics, can solve problems that affect calibration accuracy and cannot be avoided, and achieve the effects of improving distance accuracy, improving motion position accuracy, and improving calibration accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0046] The present invention will be described in detail below in conjunction with the accompanying drawings and embodiments.
[0047] Embodiments of the present invention are as follows:
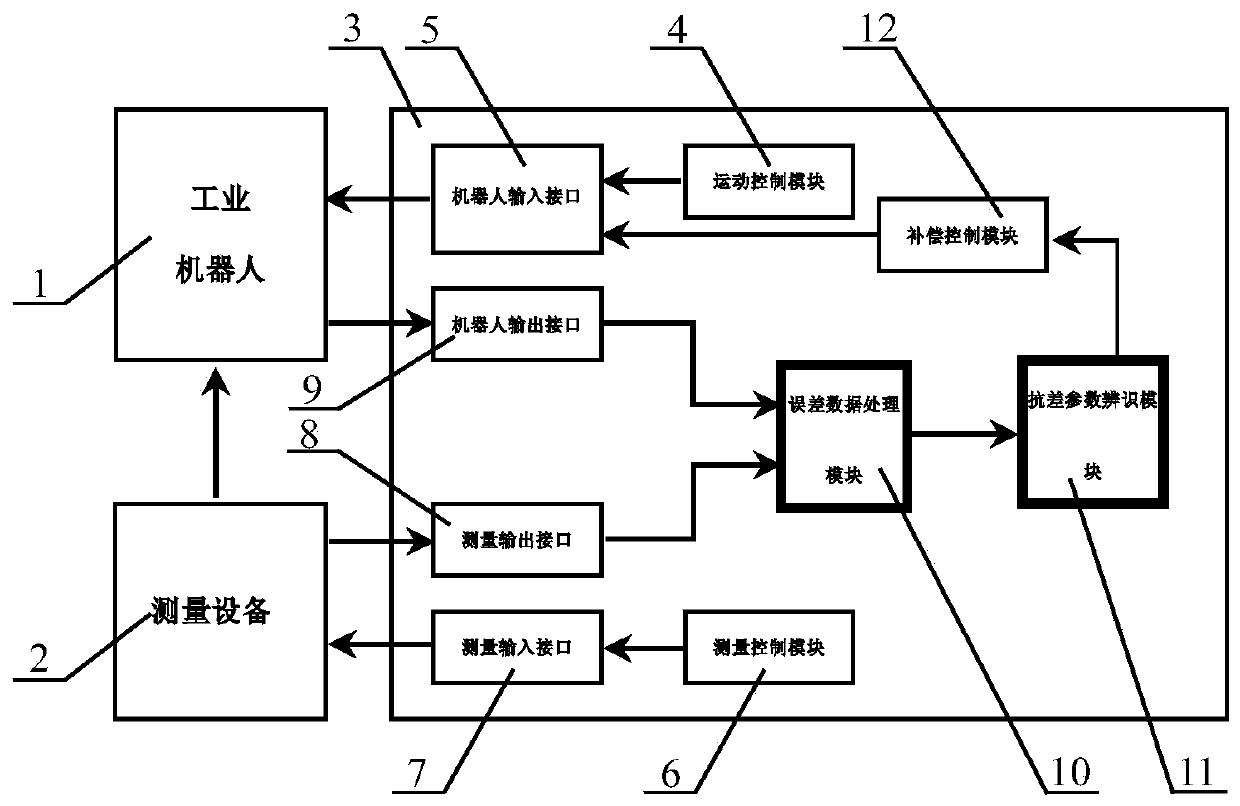
[0048] In the embodiment of the present invention, the industrial robot 1 to be calibrated is an SR4C six-degree-of-freedom industrial manipulator with an effective working radius of 672.8 mm, repeat positioning accuracy of ±0.03 mm, and a load capacity of 4 kg. The Radian laser tracker of API Company is used as the position measurement equipment of the industrial manipulator, the measurement resolution of the tracker is 1 μm, and the measurement accuracy is 5 μm. Using the Qt development environment to design and develop an industrial robot kinematics parameter calibration interconnection identification system 3 with tolerance, and use TCP / IP network communication protocol to interconnect with the industrial robot 1. During the measurement process, the target ball of the laser tracker is ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More