

Multi-degree of freedom human-simulated rigid-flexible mixing hand and manufacturing technology thereof
A degree of freedom, rigid and flexible technology, applied in the field of robotics, can solve the problems of increasing the overall volume and weight of the system, insufficient envelope space, and less active degrees of freedom, achieving good environmental interaction performance, reducing volume and mass, and active freedom. many effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
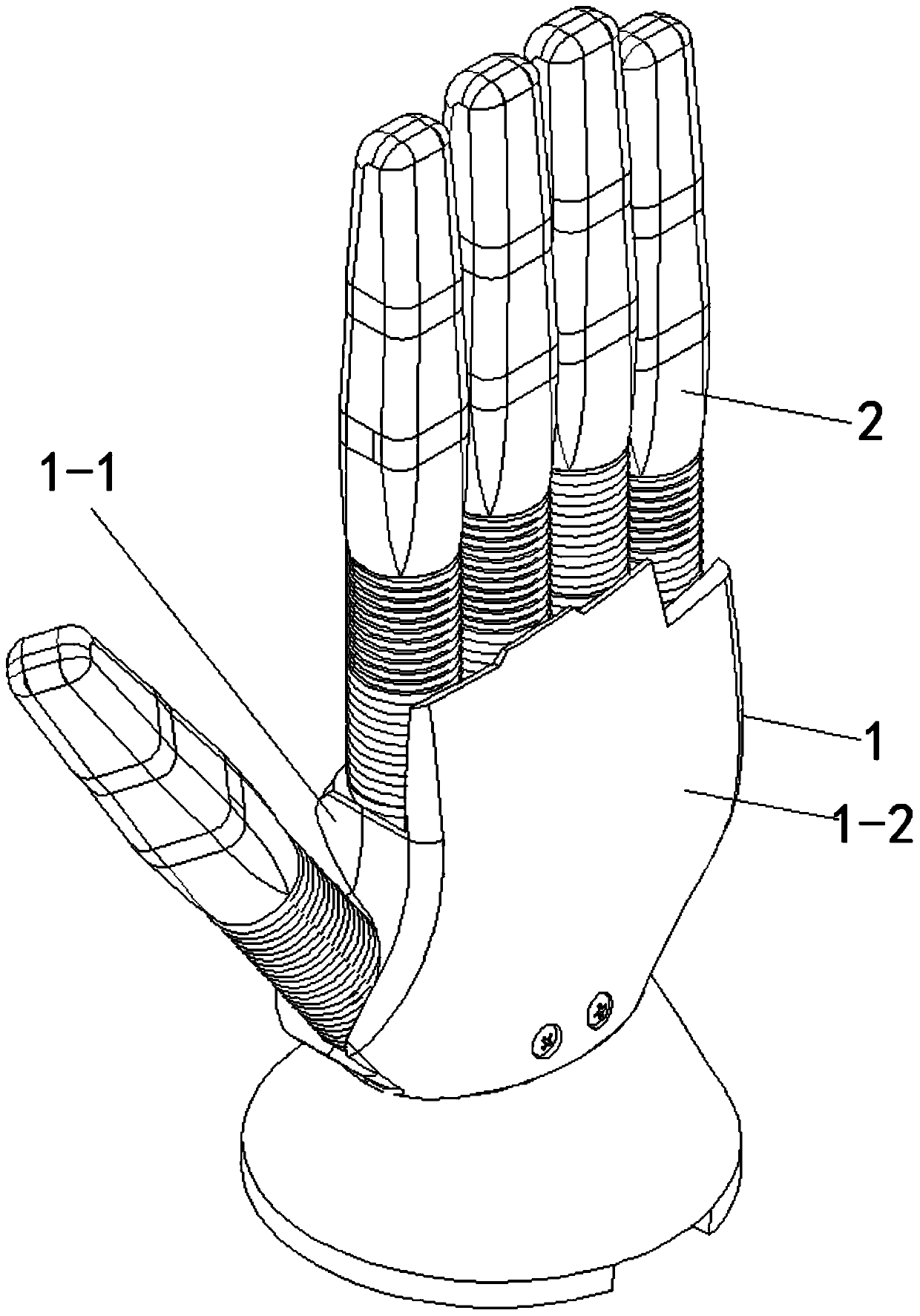
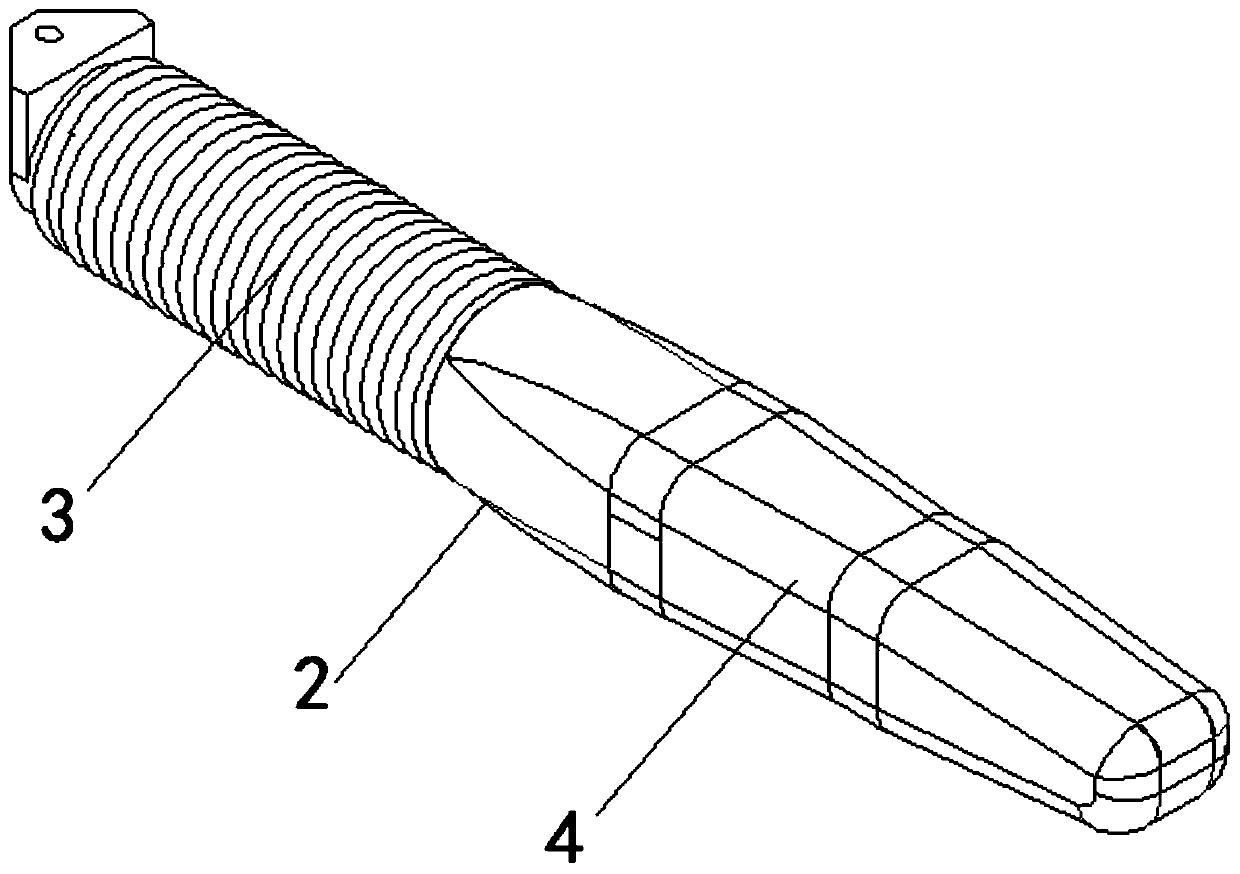
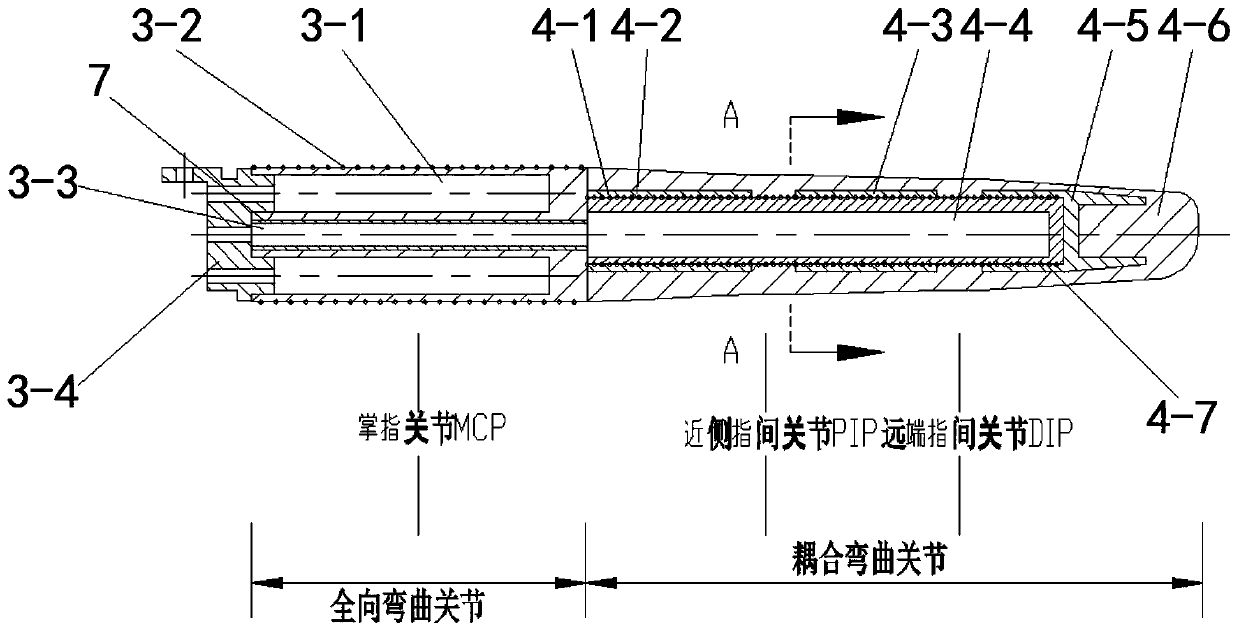
[0059] Such as Figure 1 to Figure 17 As shown, the structural design of the new modular humanoid multi-degree-of-freedom rigid-flexible hybrid manipulator: In order to obtain better body compliance than the rigid manipulator, and obtain higher stiffness and driving ability than the pure soft hand gripper, the invention designed The manipulator adopts a rigid-soft hybrid structure scheme, combining hyperelastic materials with materials with relatively high elastic modulus. The drive adopts the gas positive pressure drive scheme, which has clean energy, high energy density, fast response, low cost and high safety. In order to obtain more anthropomorphic motion performance, this rigid-flexible hybrid manipulator adopts a humanoid configuration. The whole hand is composed of five soft fingers 2 and hard palm 1 with the same structure. The soft finger 2 can be easily removed and replaced, and has interchangeability. Each soft finger 2 has five air cavities and three joints, and...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More