

Robot joint information acquisition method
A technology of robot joint and acquisition method, applied in the field of robot joint information acquisition, can solve the problems affecting the control performance of the robot and the poor quality of the joint acceleration signal, and achieve the effects of various layout methods, reasonable structure design, and convenient performance.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
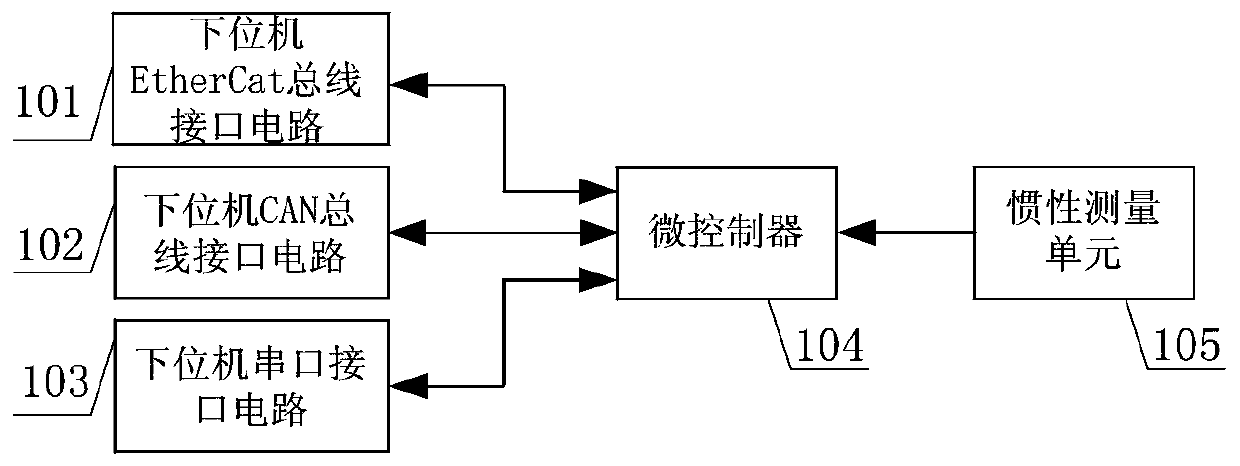
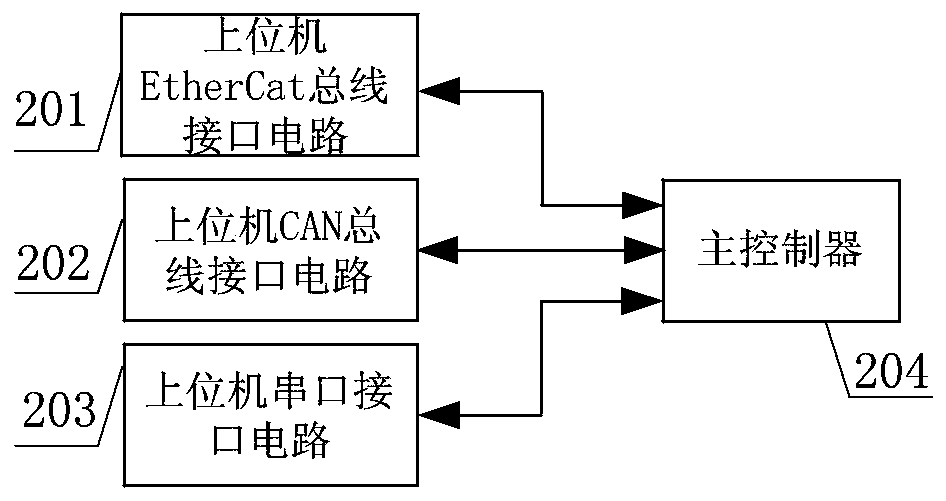
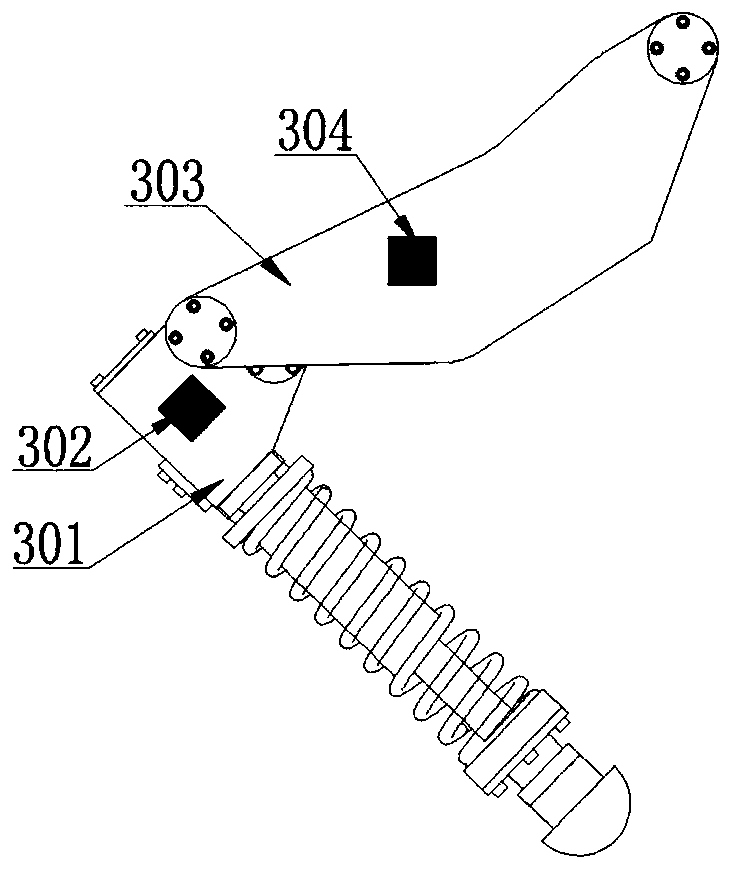
[0012] Combine below figure 1 , figure 2 and image 3 Describe this embodiment, a kind of robot joint information acquisition method described in this embodiment, it comprises lower computer EtherCAT bus interface circuit (101), lower computer CAN bus interface circuit (102), lower computer serial port interface circuit (103), Microcontroller (104), inertial measurement unit (105), upper computer EtherCAT bus interface circuit (201), upper computer CAN bus interface circuit (202), upper computer serial port interface circuit (203) and controller (204), inertial The measurement unit (105) transmits the triaxial angular velocity and triaxial acceleration information in the Cartesian coordinate system to the microcontroller (104), and the microcontroller (104) outputs the triaxial angular velocity and triaxial acceleration information according to the inertial measurement unit (105). The acceleration information calculates the three-axis angle information of the inertial coord...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More