

Control method of capacitive touch handle based on multi-sensing system
A control method and perception system technology, applied in the fields of machine learning and screen printing, information collection and processing, can solve the problems of cumbersome wearing, high cost, and high price, and achieve high sensor precision, simple structure, and high accuracy Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
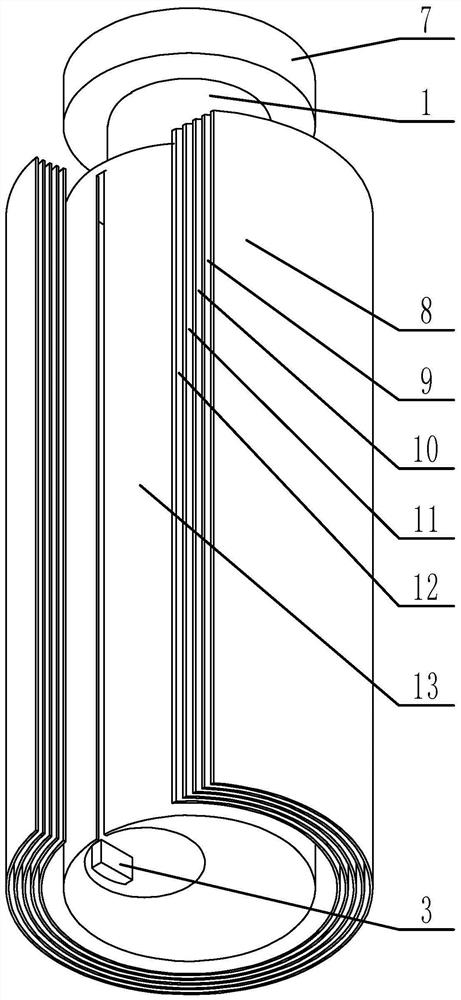
[0058] The capacitive tactile handle of this embodiment is as figure 1 As shown, it includes a cylindrical handle body 13, a capacitive array flexible pressure sensor 2 wrapped on the outer surface of the handle body, the outer surface of the handle body is provided with a gap along the length direction of the handle body, and the area inside the handle body around the gap is partially cut out. Hollow, the gap communicates with the hollowed-out area inside, which is used to place the connecting wire fixed on the flexible pressure sensor; the top of the handle body is equipped with a tension and pressure sensor for detecting the force in the vertical direction of the handle when the human hand grasps it. An inertial measurement device IMU 3 is installed in the hollowed-out area inside the handle body. The inertial measurement device IMU is used to detect and reflect the movement state of the handle body during the process of the operator grasping the tactile handle in real time,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More