

Neural network control method for backlash compensation of turntable servo system
A neural network control and servo system technology, applied in the field of electromechanical control, can solve the problems of fast response speed, good stability, low tracking accuracy and low tracking stability, and achieve overcoming the influence of backlash nonlinearity, high-precision tracking control, Good estimate of the effect of velocity information
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0047] The technical solutions in the embodiments of the present invention will be clearly and completely described below in conjunction with the drawings in the embodiments of the present invention.
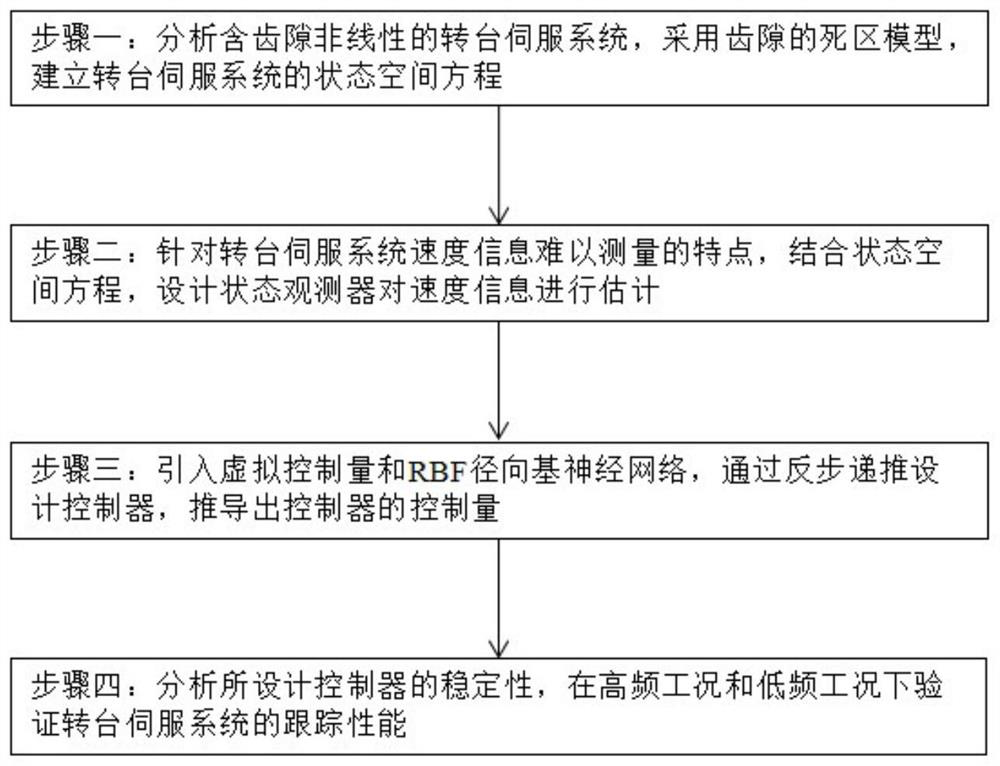
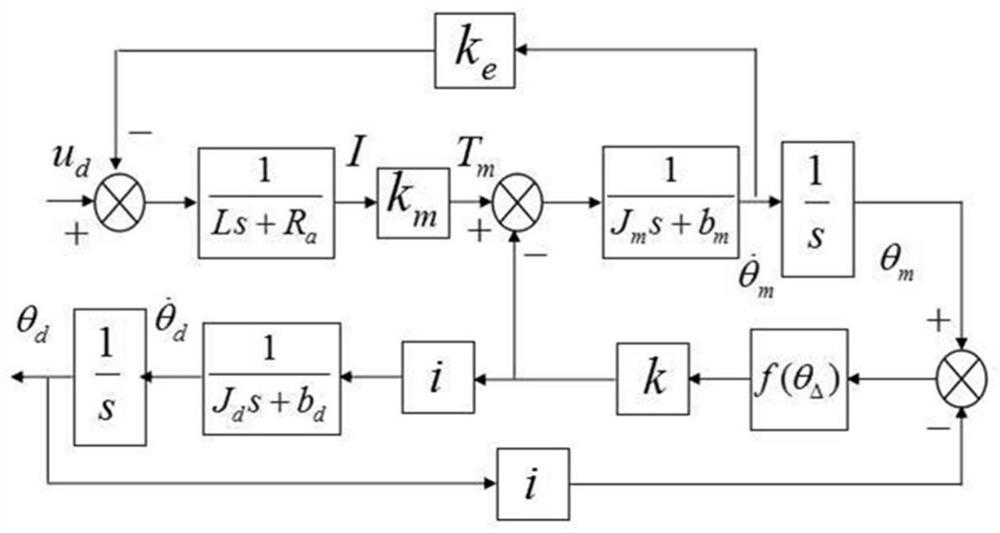
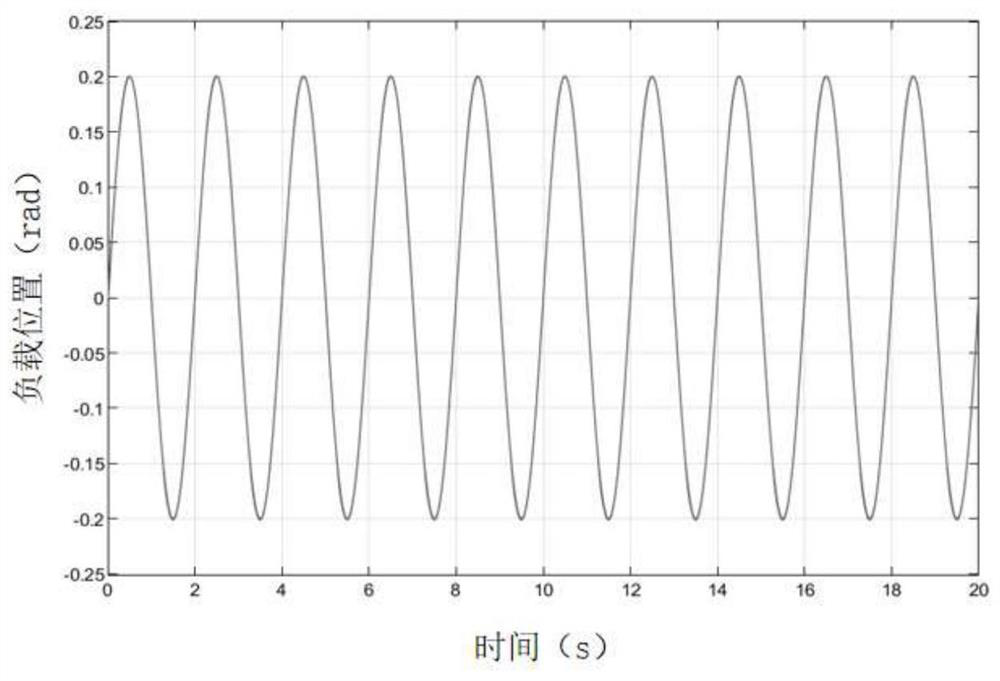
[0048] The object of the present invention is to provide a neural network control method for backlash compensation of the turntable servo system, so as to realize the dynamic performance of high precision, fast response speed and smooth tracking. figure 1 A flow chart of a neural network control method for backlash compensation of a turntable servo system provided by the present invention, figure 2 The corresponding mathematical model control flow chart includes the following steps:
[0049] 1) Analyze the turntable servo system with backlash nonlinearity, and use the dead zone model of backlash to establish the state space equation of the turntable servo system.
[0050] The dynamic equations are respectively established for the motor shaft and the load shaft, and the establi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More