

A jellyfish-like micro-swimming soft robot driven by visible light and method thereof
A robot and imitation jellyfish technology, which is applied in the field of bionic robots, can solve the problems of application limitations of soft micro-robots, large and complex structure of magnetic field generating devices, etc., and achieve excellent light-to-heat conversion efficiency, high application value and environmental adaptability.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
preparation example Construction
[0045] The preparation of the soft robot comprises the following steps;
[0046] Step A1, N-isopropylacrylamide referred to as NIPAM, N,N'-methylenebisacrylamide referred to as BIS, and 2-hydroxy-4'-(2-hydroxyloxy)- 2-Methyl propiophenone and DMSO for short are fully mixed together to obtain N-isopropylacrylamide solution for short of NIPAM;
[0047] Step A2, the carbon nanotubes are referred to as CNT, and the CNT is dissolved in PEDOT:PSS solution to configure a CNT suspension; then the ice bath is ultrasonically treated for a preset period of time to obtain a uniform CNT suspension;
[0048] Step A3, mixing the NIPAM solution and the CNT suspension, and ultrasonically treating the water bath for a preset period of time to obtain a NIPAM / CNT mixture;
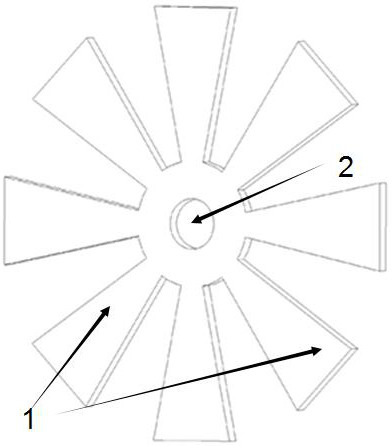
[0049] Step A4, preparing a jellyfish-shaped mold with a sheet-shaped cavity with light materials;
[0050] Step A5, coating the NIPAM / CNT mixed solution in the sheet-shaped cavity of the jellyfish-shaped mold, and then irra...
Embodiment 1
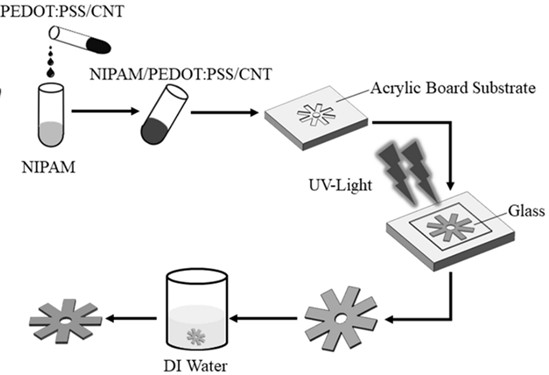
[0059] (1) Preparation of NIPAM / CNT mixed solution: First, NIPAm (57.5 mg), BIS (0.783 mg), Photo-initiator (1.14 mg), and DMSO (40.6 μL) were thoroughly mixed together to obtain a NIPAM solution. Secondly, CNTs were dissolved in PEDOT:PSS solution to prepare a 5 mg / mL solution, and then sonicated in an ice bath for 10 minutes to obtain a CNT suspension. Finally, the NIPAM solution and the CNT suspension were mixed together at a volume ratio of 3:1, and the water bath was sonicated for 10 minutes to obtain a NIPAM / CNT mixture.
[0060] (2) Preparation of jellyfish-like microsoft robots: a jellyfish-shaped mold was cut out on an acrylic plate with a laser cutting machine, the thickness of the mold was about 200 μm, and the maximum diameter was about 0.7 cm. Apply the NIPAM / CNT mixture obtained in (1) evenly in the mold, and then cover the surface of the mold with a cover glass. Under the sealing effect of the liquid, the cover glass will be completely attached to the acrylic p...
Embodiment 2
[0067] The steps of (1)-(3) in Example 1 were used to prepare jellyfish-like microsoft robots.
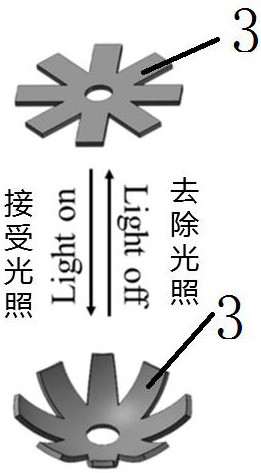
[0068] Adjust the pulse signal to control the light source, so that the light source is "on-off" at a higher frequency, so as to achieve the purpose of improving the movement speed of the jellyfish-like microsoft robot. Its principle is as follows: the motion speed of the imitation jellyfish miniature soft robot in the present invention is related to the frequency of its deformation. When the frequency of its deformation increases, the speed at which it bends and drains water increases, so its movement speed also increases. Therefore, when the "on-off" frequency of the light source increases, the movement speed of the jellyfish microsoft machine increases accordingly. In the same way, when the frequency of "on-off" of the light source decreases, its movement speed will also decrease.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More