

Method for improving robustness and contour performance of double-axis or three-axis feed driving system
A system robust and feed-driven technology, applied in control systems, vector control systems, motor control, etc., can solve the problems that affect the contour tracking accuracy of multi-axis motion systems, large contour errors at trajectory turning points, and slow dynamic response speeds, etc. , to achieve the effects of improving transient contour tracking performance, improving motion stability and contour accuracy, and good robustness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
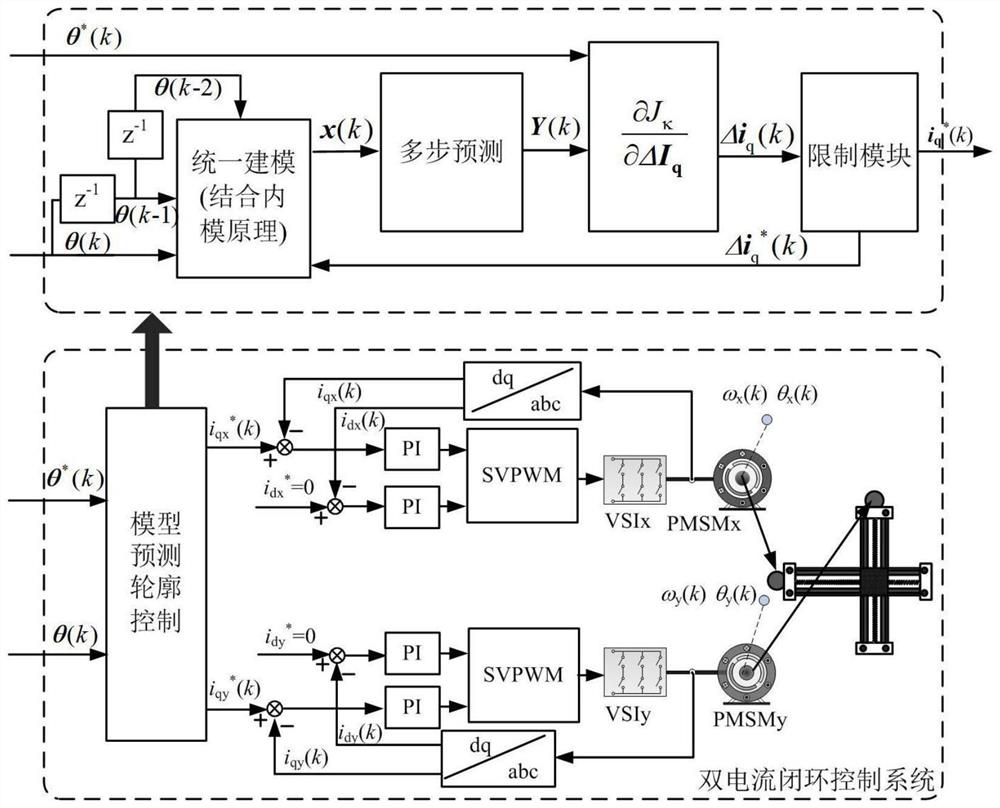
[0074] In the invention, the motion mechanism and multiple electric motors are modeled in a unified manner, combined with the internal model principle, and unmodeled nonlinear friction and slowly time-varying disturbance are suppressed. A two-axis or three-axis position-current predictive controller is designed by a state-space-based model predictive control method, and the contour error and tracking error are added to the value function as internal variables of the two-axis or three-axis feed drive system, and then the model is used The idea of multi-step prediction, rolling optimization and feedback correction in predictive control seeks the control input signal that coordinates and optimizes tracking accuracy and contour accuracy. At the same time, according to the actual needs, considering the constraint conditions, a posteriori constraint limit network of current increment is established; finally, the purpose of improving the tracking and contour control performance of t...
Embodiment 2
[0080] For the model predictive contour control method of the dual-axis feed drive system, the solution in Embodiment 1 will be further introduced below in combination with calculation formulas and examples. See the description below for details:
[0081] (1) Establishment of a unified model of the dual-axis feed drive system
[0082] The mathematical model of the motion mechanism in the dual-axis feed drive system is:
[0083]
[0084] In the formula, k is the current moment, M i is the mass of moving parts; p i is the actual position of the track; for p i a derivative of for p i The second derivative of C i is the viscous friction coefficient of moving parts; f i is the driving force driving the slider movement; F fi is a nonlinear friction that can be regarded as an unknown constant disturbance.
[0085] The motion equation of the permanent magnet synchronous motor driving the dual-axis feed drive system is:
[0086]
[0087] In the formula, J i is the mo...
Embodiment 3
[0127] For the model predictive contour control method of the three-axis feed drive system, the scheme in Embodiment 1 will be further introduced below in combination with calculation formulas and examples. See the description below for details. This embodiment focuses on the parts that are different from Embodiment 2. The same parts will not be repeated:
[0128] (1) Establishment of a unified model of the three-axis feed drive system
[0129] The state equation of the three-axis feed drive system can be expressed as:
[0130]
[0131] In the formula, Δi q (k)=[Δi qx T (k) Δi qy T (k) Δi qz T (k)] T ;y(k)=[θ x (k) θ y (k) θ z (k)] T ;x(k)=[θ x (k) θ x (k-1) θ x (k-2) θ y (k) θ y (k-1) θ y (k-2) θ z (k) θ z (k-1) θ z (k-2)] T ; Δi qi (k)=[Δi qi (k) Δi qi (k-1)] T ; c i =[1 0 0].
[0132] (2) Multi-step prediction
[0133] The matrix of multi-step prediction output is:
[0134] Y=Fx(k)+GΔI q (15)
[0135] In the formula, Y=[y T (k+1)y T...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More