X-shaped large arm for laser cutting of industrial robot
An industrial robot and laser cutting technology, applied in the field of X-shaped arms, can solve the problems of deviation of the robot end from the theoretical coordinate point and positioning error, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
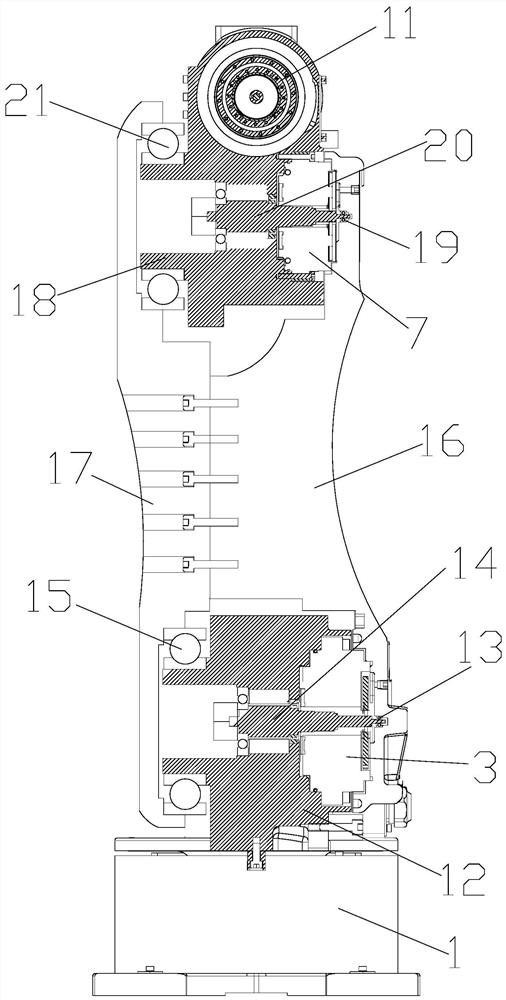
[0019] like figure 2 As shown, an X-shaped arm of an industrial robot used for laser cutting, J1 axis 1 is the joint axis 1 of the industrial robot, and the two ends of J2 casting workpiece 12 are respectively installed with integrated servo motor J2 input gear shaft 14, J2RV reducer 3 and Load bearing J2 bearing 15. The outer ring of the J2 gear shaft locating bearing 13, the J2 gear shaft locating bearing 19 locates the X-type big arm right half 16, and the outer ring of the J2 bearing 15, J3 bearing 21 locates the X-type big arm left half 17. The integrated servo motor J2 input gear shaft 14 directly drives the J2RV reducer 3, the integrated servo motor J2 input gear shaft 14 gear decelerates through the meshing J2RV reducer 3, and the output end of the J2RV reducer 3 drives the right half of the J3 axis X-shaped boom 16, The left half of the X-shaped upper arm moves 17. The two ends of J4 casting workpiece 18 are respectively installed with integrated servo motor J3 inp...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More