

Unmanned aerial vehicle inspection method and system for transformer substation
A technology of unmanned aerial vehicles and substations, applied in control/regulation systems, photo interpretation, computer parts, etc., it can solve the problems of small content changes, no autonomous flight plan, and inability to achieve content periodicity, so as to meet the requirements of online diagnosis. Accuracy, improve inspection efficiency, and solve the special needs of the industry
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
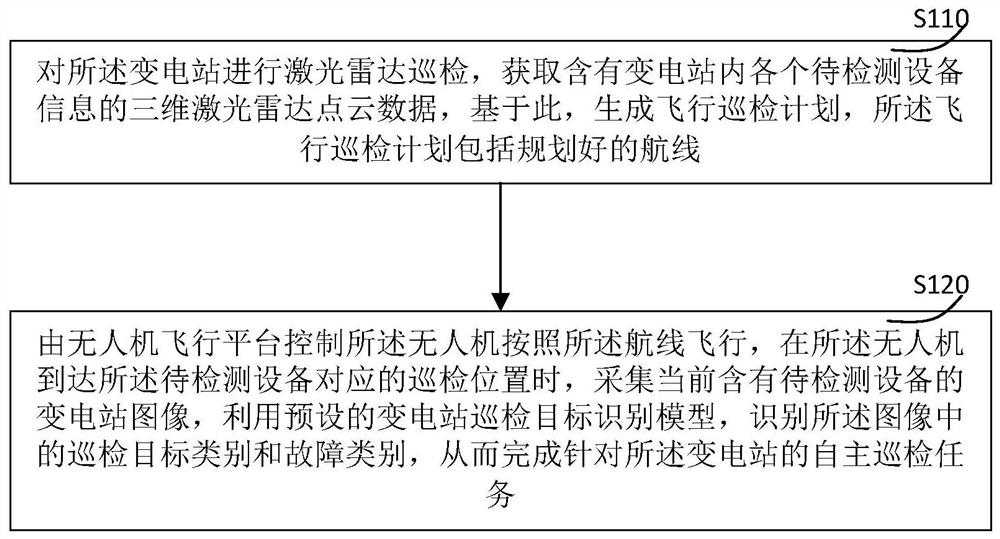
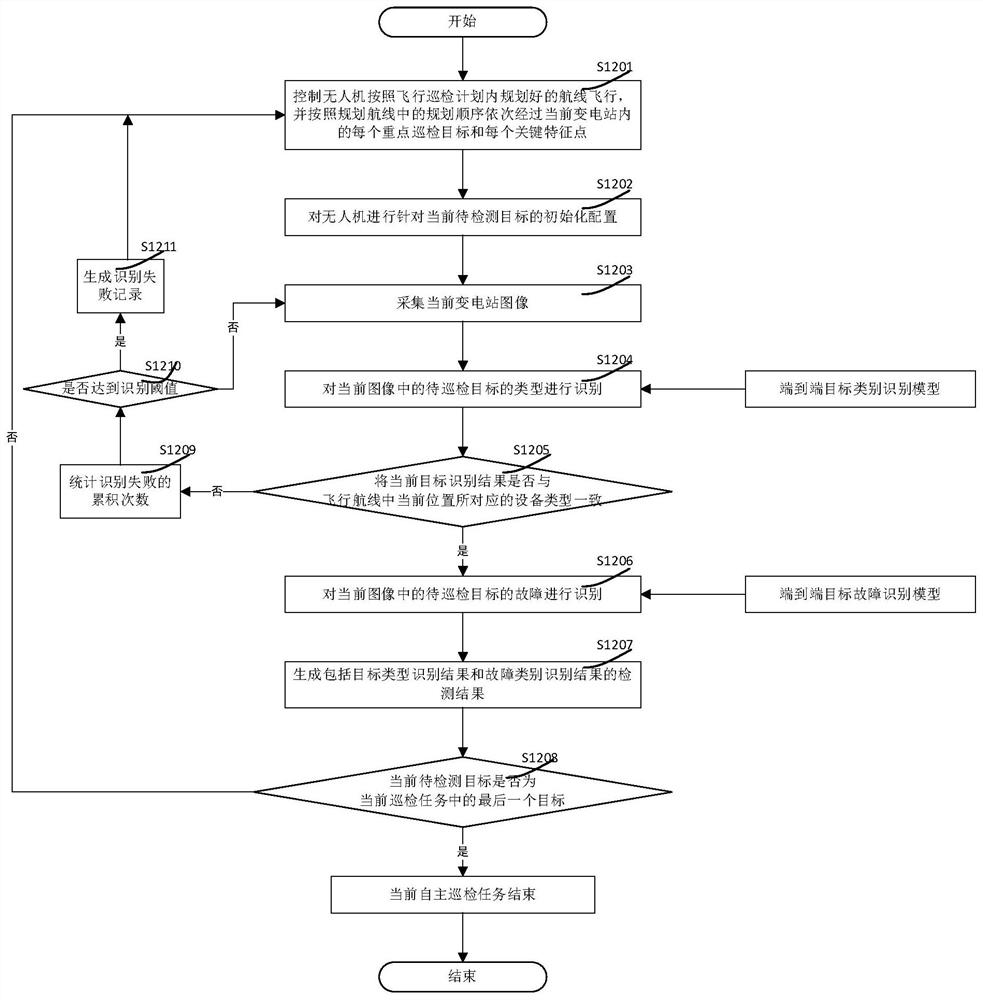
[0032] figure 1 It is a step diagram of the drone inspection method for substations according to the embodiment of the present application. Such as figure 1 As shown, step S110 performs laser radar inspection on the current substation, and the (inside the UAV) inspection plan planning subsystem 510 acquires the 3D laser radar point cloud data containing information on each equipment to be inspected in the substation, based on this, generates a flight Inspection plan. Among them, the flight inspection plan includes the planned flight route for the current substation. Then, step S120 (inside the UAV) autonomous inspection subsystem 520 determines all the devices to be detected in the current substation, and the UAV flight platform controls the UAV according to the planned flight inspection plan generated in the above step S110 Airline flight, when the UAV arrives at the inspection location corresponding to the equipment to be inspected in real time, collect the current substa...
Embodiment 2
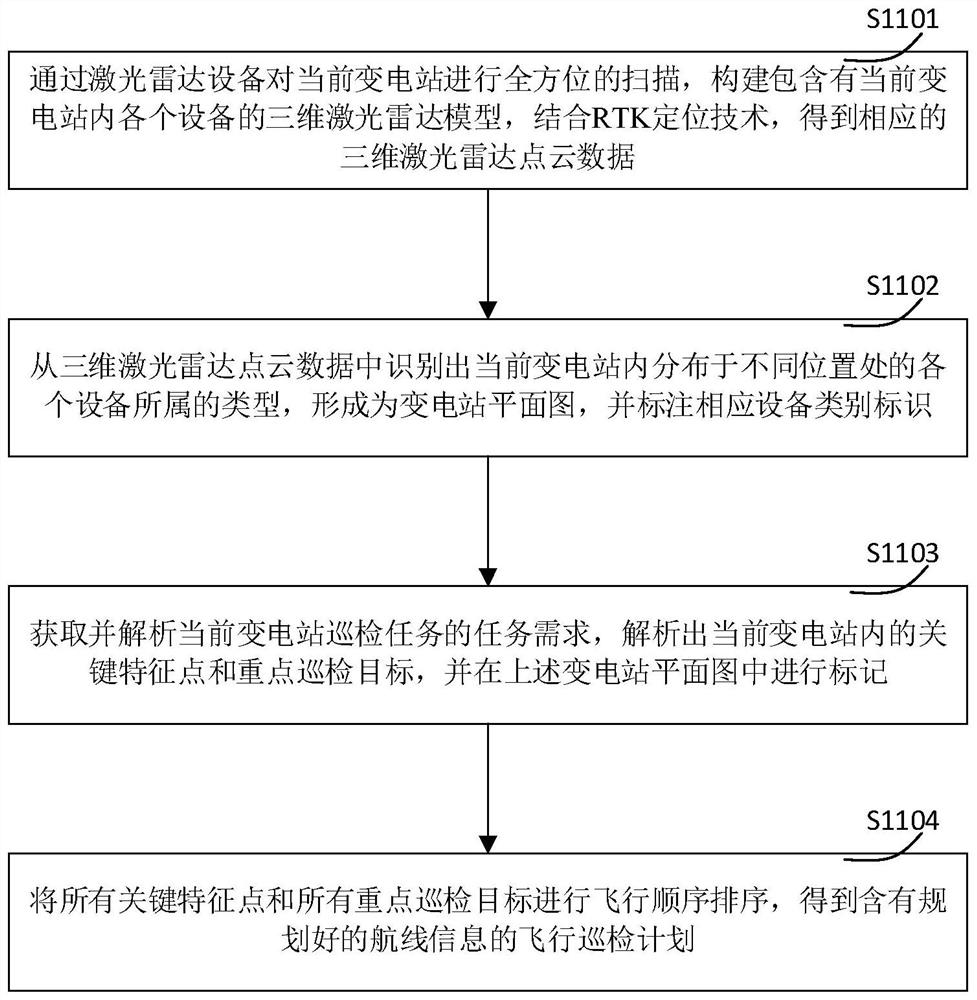
[0050] Based on the UAV inspection method for substations described in the first embodiment above, in order to improve the inspection safety and inspection accuracy of the method in the actual application process, it is also necessary to perform the flight inspection after generating the route plan. In the plan, the optimal flying height and the optimal acquisition angle of the acquisition equipment required for each equipment to be inspected (equipment to be inspected) in the current substation are added to improve the accuracy and safety of the subsequent autonomous inspection process . Figure 4 It is an overall flow chart of the drone inspection method for substations according to the embodiment of the present application. Combine below figure 1 and Figure 4 The overall flow of the drone inspection method described in the present invention will be further described.
[0051] Step S401 scans the current substation in all directions through the laser radar equipment, con...
Embodiment 3
[0067] On the other hand, based on the UAV inspection method for substations described in Embodiment 1 and / or Embodiment 2 above, a UAV inspection system for substations is also proposed. Man-machine inspection method. Figure 5 It is a schematic structural diagram of a UAV inspection system for substations according to an embodiment of the present application. Such as Figure 5 As shown, the drone inspection system described in the embodiment of the present invention includes: an inspection planning subsystem 510 and an autonomous inspection subsystem 520 .
[0068] Wherein, the inspection plan planning subsystem 510 is implemented according to the method described in the above-mentioned step S110, and is configured to perform laser radar inspection on the current substation, and obtain 3D laser radar point cloud data containing information of each equipment to be inspected in the substation. Based on this, Generate flight inspection plan. Among them, the flight inspection...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More