

Magnetic flexible tactile sensing structure based on folding magnetizing method and application
A technology of tactile sensing and magnetic flexibility, applied in the field of physical sensors, can solve problems such as single information, inability to obtain specific position information, and limited to pressure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0041] The present invention will be further described below in conjunction with embodiment:
[0042] 1. Disk production:
[0043] 1. Ratio of materials
[0044] According to the material mass ratio SE 1700 (DOW DOW silicone adhesive DOWSILTMSE1700, 11.71%), SE1700 supporting catalyst (1.17%), Ecoflex 00-30Part B (21.78%), fumed silica nanoparticles (2.72%), and relative After the ratio of NdFeB particles (62.62%) with a diameter of 5 μm is completed, the 3D printing raw material is obtained by adjusting the mixer (Thinky, AR100) for stirring and defoaming operations.
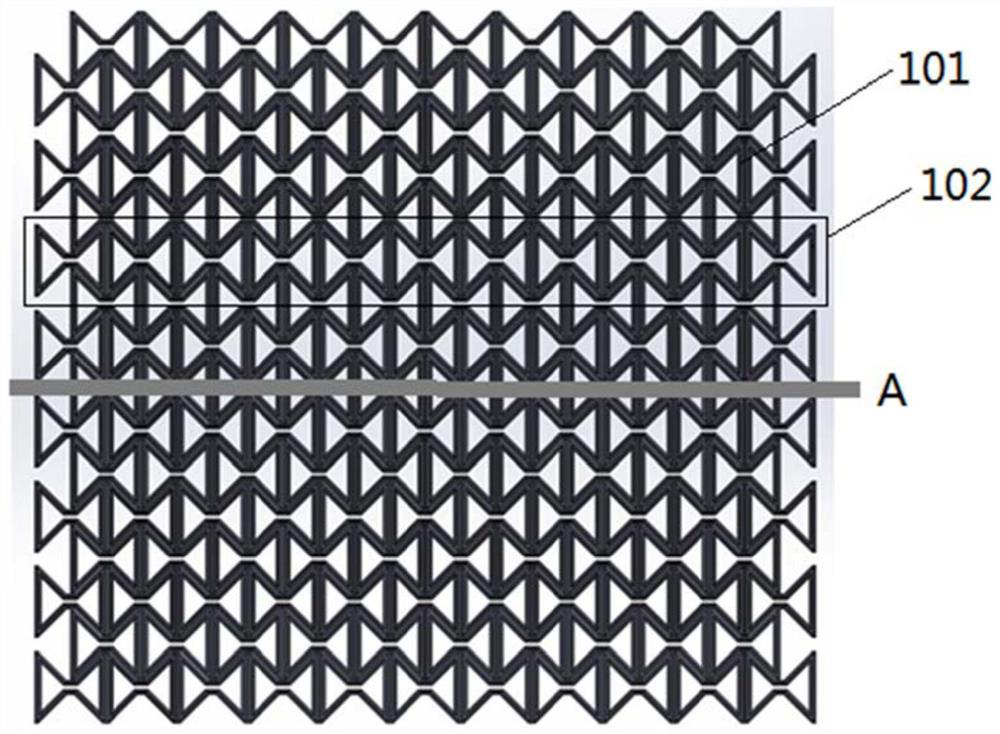
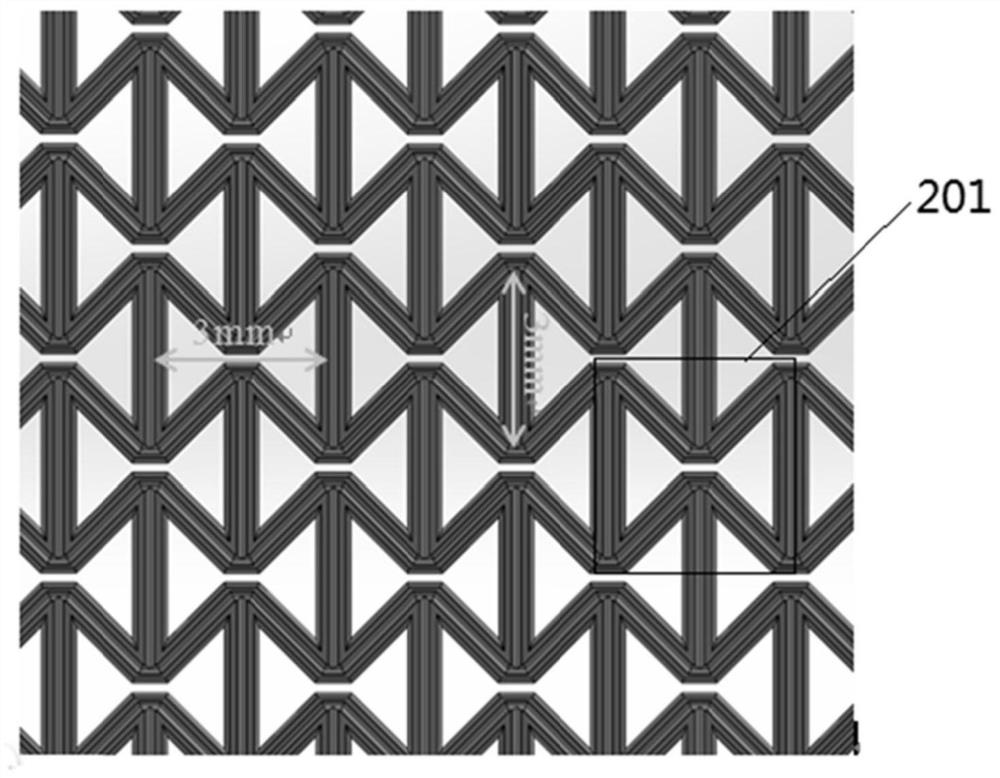
[0045] Using existing 3D software to design such as figure 1 with 2 The three-dimensional model of the magnetic sheet shown is sliced using existing slice software to obtain the Gcode code corresponding to the three-dimensional model, and then subsequent printing is performed.
[0046] 3D printing technology can be used to quickly obtain complex structures. This invention uses 3D printing technology to co...
PUM
| Property | Measurement | Unit |
|---|---|---|
| thickness | aaaaa | aaaaa |
| diameter | aaaaa | aaaaa |
Abstract
Description
Claims
Application Information
 Login to View More
Login to View More