

Adaptive Robust h of Inverted Pendulum System Based on Sliding Mode Control ∞ Control Method
A technology of adaptive robustness and control method, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve the problems of difficult analysis and control of inverted pendulum systems, stabilize and unstable inverted pendulum systems, etc. System uncertainty and external disturbance, improving control performance, and the effect of a wide range of applications
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
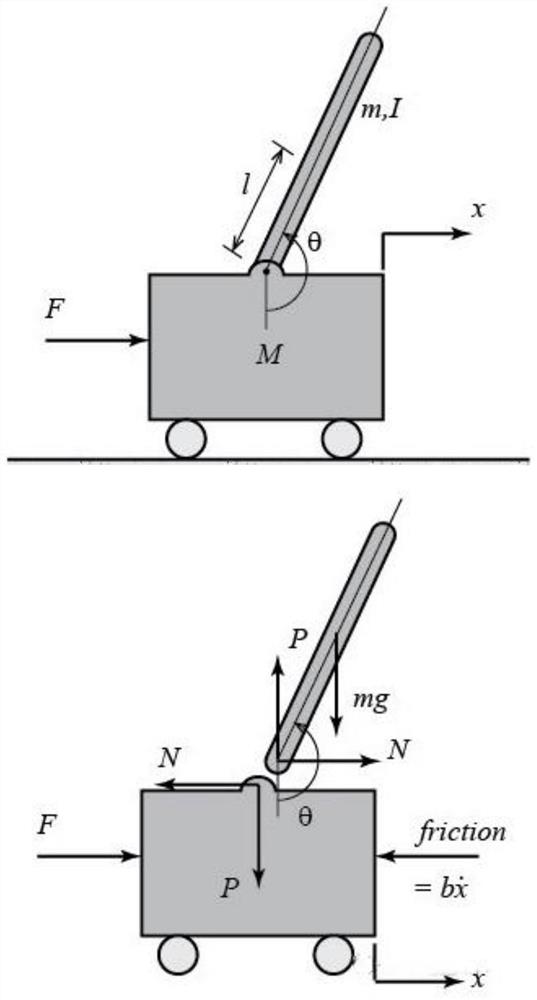
[0014] like figure 1 As shown, an inverted pendulum system involved in this embodiment is used as a simplified simulation of underwater robots, satellites, and rockets. Stable and may fall down at any time, the wheels of the movable base are controlled by the motor, and the rotation torque of the motor, the number of turns of the wheel and the inclination of the upright part relative to the vertical direction are obtained through the sensor.
[0015] The movable base and the upright part only move in one plane. Without considering the wheel slippage, the force on the movable base is obtained by multiplying the wheel radius by the motor torque, and the position of the movable base is obtained according to the number of turns of the wheel, specifically: The mass of the movable base M=0.5kg, the mass of the upright part m=0.2kg, the distance from the center of gravity of the upright part to the joint l=0.3m, the moment of inertia of the upright part I=0.024kg·m 2 , the force act...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More