

Non-contact rocker sensor, control device and processing system and method
A non-contact, sensor technology, applied in the field of control devices and processing systems, non-contact rocker sensors, can solve the large deviation of the rotation position of the magnetic sensitive IC chip, the low control accuracy of the rocker potentiometer, and the inability to produce rocker Rod potentiometer and other problems, to achieve the effect of compact structure, large elasticity, small size and light weight
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
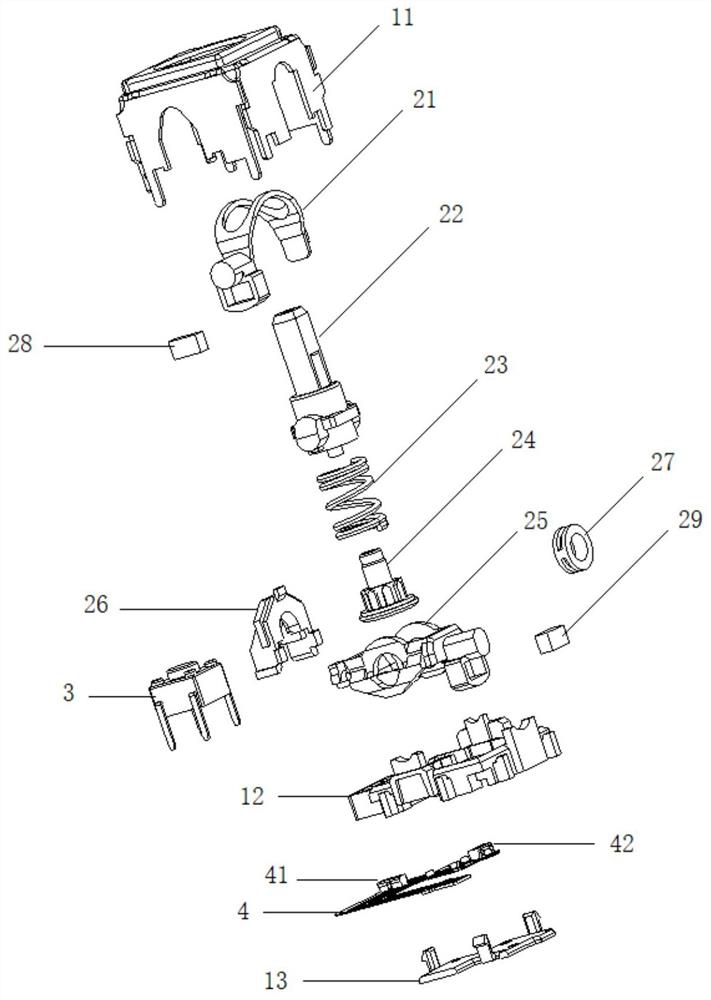
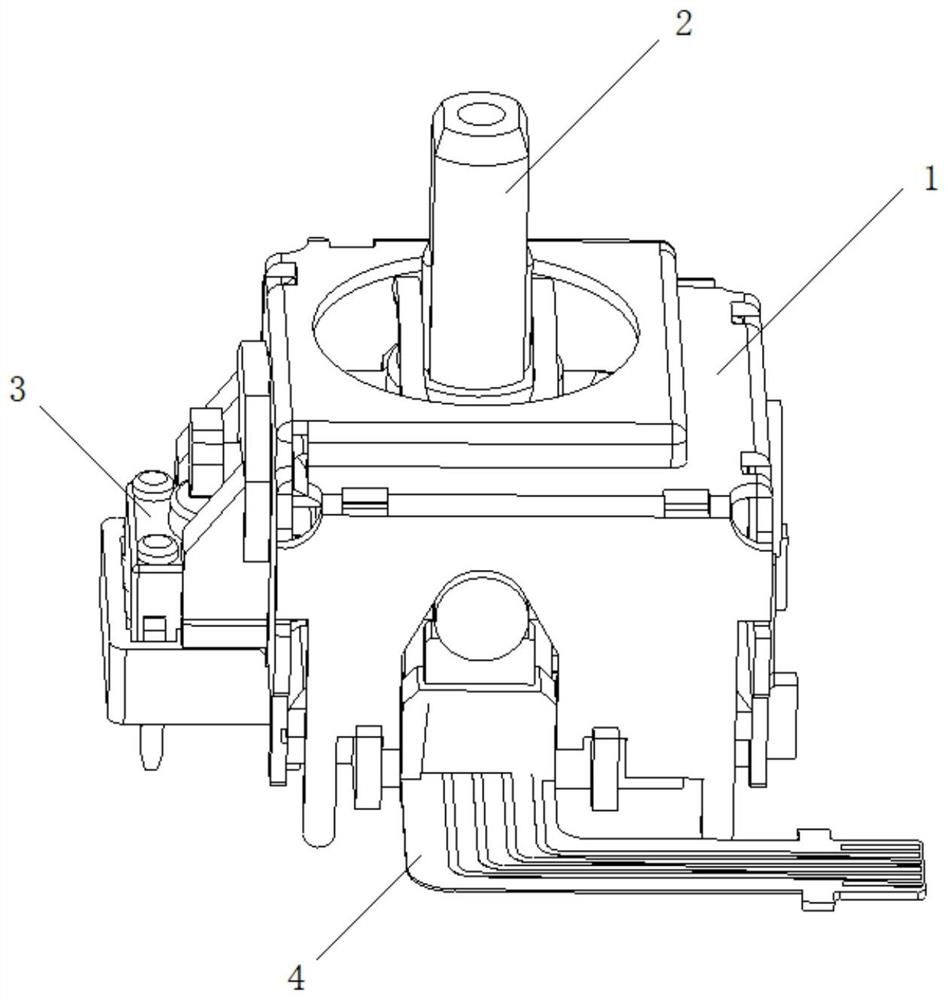
[0072] This embodiment provides a non-contact rocker sensor, such as figure 1 with figure 2 As shown, including rocker assembly 2 and magnetic induction IC assembly 4;
[0073] The rocker assembly 2 includes a first magnet 28 and a second magnet 29, the rocker assembly 2 is used to generate swings in a first direction and a second direction perpendicular to each other, and the first magnet generated following the swing in the first direction The swing of the magnetic field and the swing of the second magnetic field generated by the second magnet following the swing in the second direction; preferably, the first magnet 28 and the second magnet 29 are in the shape of a cuboid or a cube.
[0074] The magnetic induction IC assembly 4 includes a first magnetic induction element 41 and a second magnetic induction element 42, which are used to generate the first electrical signal corresponding to the change in the distance between the first magnet and the first magnetic induction e...
Embodiment 2
[0109] This embodiment provides a control device, including the non-contact joystick sensor in Embodiment 1, which can be used as a control component for drones, game machines, and the like.
Embodiment 3
[0111] This embodiment provides a non-contact rocker sensor processing method, such as Figure 14 shown, including the following steps:
[0112] S1. Respectively obtain the end values of the swing angles in the first direction and the second direction of the non-contact rocker sensor in Embodiment 1 and the end values of the output voltages corresponding to the end values of the swing angles; preferably, the end values of the swing angles include Leftmost swing angle end value, upright swing angle end value and rightmost swing angle end value;
[0113] S2. Establish an optimization model:
[0114] minw=||u k1 (ω, θ 1 , t 1 ,ε)-u k2 (ω, θ 2 , t 2 ,ε)|-|u k3 (ω, θ 2 , t 3 ,ε)-u k4 (ω, θ 1 , t 4 ,ε)||
[0115] Among them, ω is the swing speed of the rocker in the first direction (or the second direction), ε is the error parameter, θ 1 is the first angle of the joystick in the first direction (or the second direction), θ 2 is the second angle of the rocker ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More