

Prostate puncture robot guided by transrectal ultrasound image
An image-guided, rectal ultrasound technology, applied in the field of medical devices, can solve the problems of low industrialization, low reliability, and low positioning accuracy, and achieve high industrialization, high positioning accuracy, and avoid deformation.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
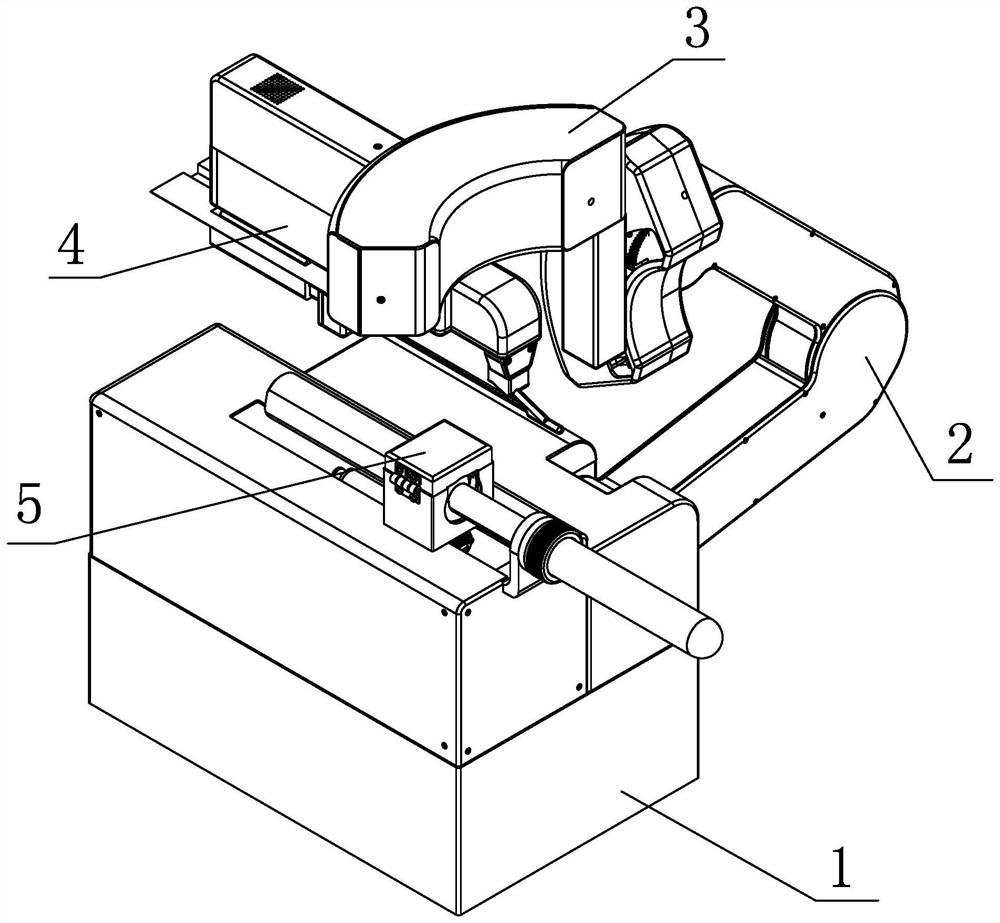
[0068] Embodiment 1: Combining Figure 1 to Figure 4 , Figure 17 and Figure 18 This embodiment will be described. A transrectal ultrasound image-guided prostate puncture robot of this embodiment is described. The prostate puncture robot includes a base 1, a robotic arm module 2, an arc-shaped telecentric module 3, a puncture needle clamping module 4, and a The ultrasonic probe clamping module 5; the robotic arm module 2 and the ultrasonic probe clamping module 5 are both installed on the base 1, the puncture needle clamping module 4 is the end effector of the prostate puncture robot, and the puncture needle clamping module 4, arc-shaped The telecentric module 3 and the robotic arm module 2 are sequentially connected from the end to the head end; the ultrasonic probe clamping module 5 includes an autorotation joint and a moving joint, and the ultrasonic probe clamping module 5 is used to realize the feeding motion of the ultrasonic probe and rotating motion to meet the need...
specific Embodiment approach 2
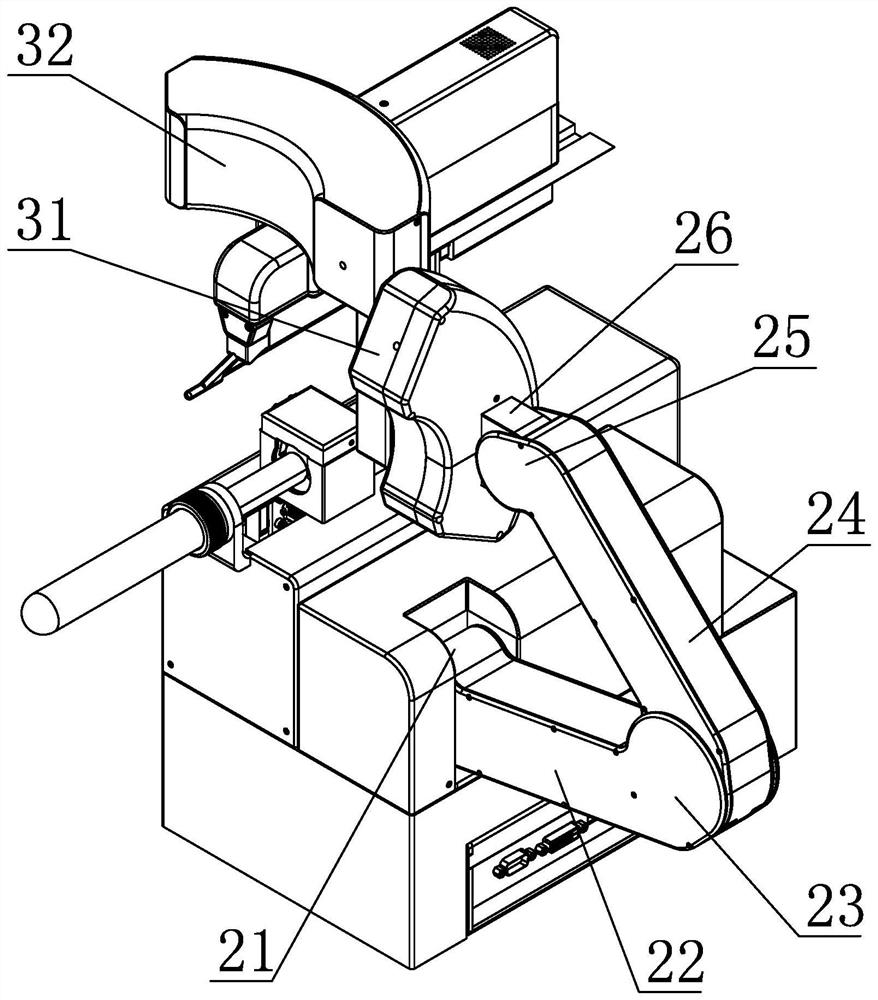
[0071] Specific implementation mode 2: Combining figure 1 and figure 2 Illustrating this embodiment, the robot arm module 2 of this embodiment includes a robot arm module base, a first rotating shaft 21 , a first robot arm 22 , a second rotating shaft 23 , a second robot arm 24 , a third rotating shaft 25 , and a robot arm connector 26. The shoulder rotary motor and the elbow rotary motor; the base of the manipulator module is installed on the base 1, the end side of the base of the manipulator module away from the ultrasonic probe clamping module 5 is processed with a gap, and the first manipulator 22 is placed at the head end At the gap of the base of the manipulator module, the head end of the first manipulator 22 is fixedly connected with a first rotating shaft 21, the end of the first rotating shaft 21 is rotatably connected to the base of the manipulator arm module, and the shoulder rotary motor is installed on the base of the manipulator arm module. Inside, the motor ...
specific Embodiment approach 3
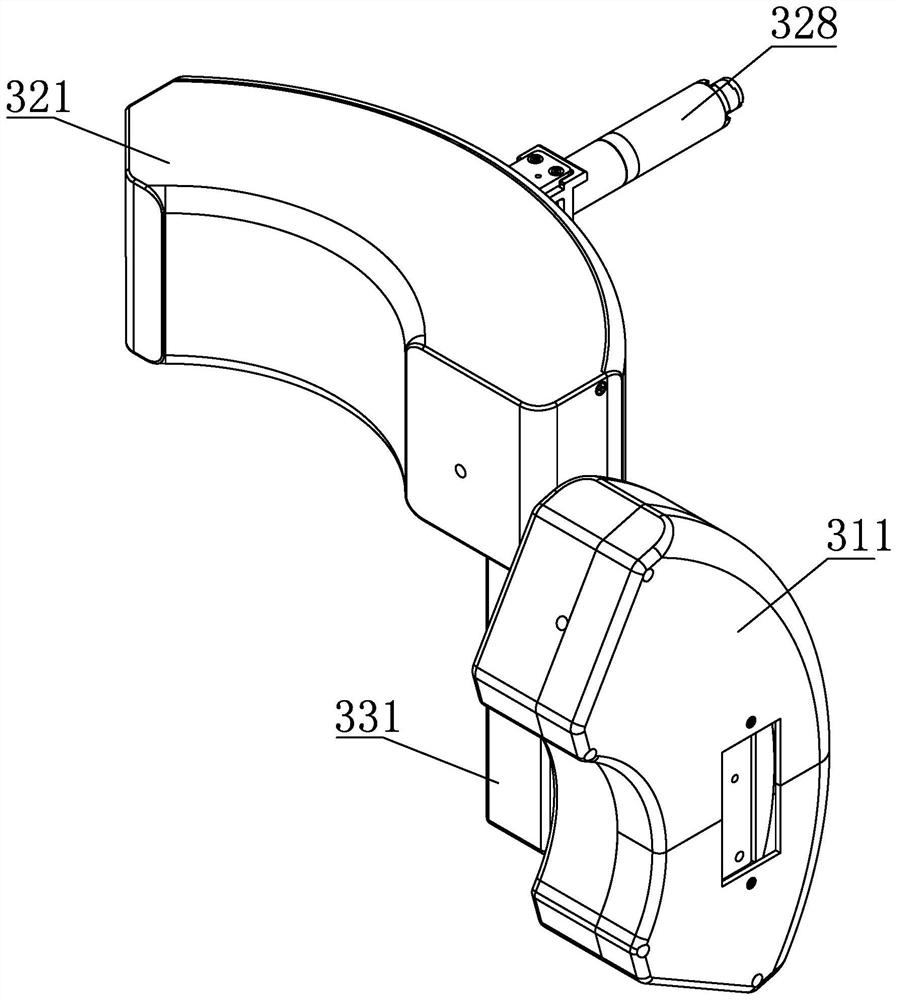
[0073] Specific implementation three: combination Figure 3 to Figure 7Describing this embodiment, the pitch arc-shaped member 31 of this embodiment includes a housing b311, an arc-shaped track b312, a slider b313, an absolute encoder b314, an encoder magnetic strip b315, a gear set b316, a motor mounting bracket b317, and a motor b318 The shell b311 is an arc-shaped hollow box, one end face of the shell b311 is fixedly connected with the end of the manipulator connecting piece 26, and the other end face of the shell b311 is machined with an arc-shaped through hole b along the circumferential direction, and the arc-shaped track b312 is the same as The shaft is arranged inside the shell b311; the arc-shaped track b312 includes an arc-shaped rack b3121, a track body b3122 and a guide rail b3123; the track body b3122 is fixedly installed on the inner wall of the shell b311, and the inner circle of the arc-shaped rack b3121 is distributed with a number of teeth , the arc-shaped ra...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More