

Celebral operating robot system based on optical tracking and closed-loop control and its realizing method
A robotic system and optical tracking technology, applied in the field of robotics, can solve problems such as time-consuming and laborious, patient pain and pressure, and complex calibration and positioning methods.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0095] The present invention is described in detail with reference to accompanying drawing:
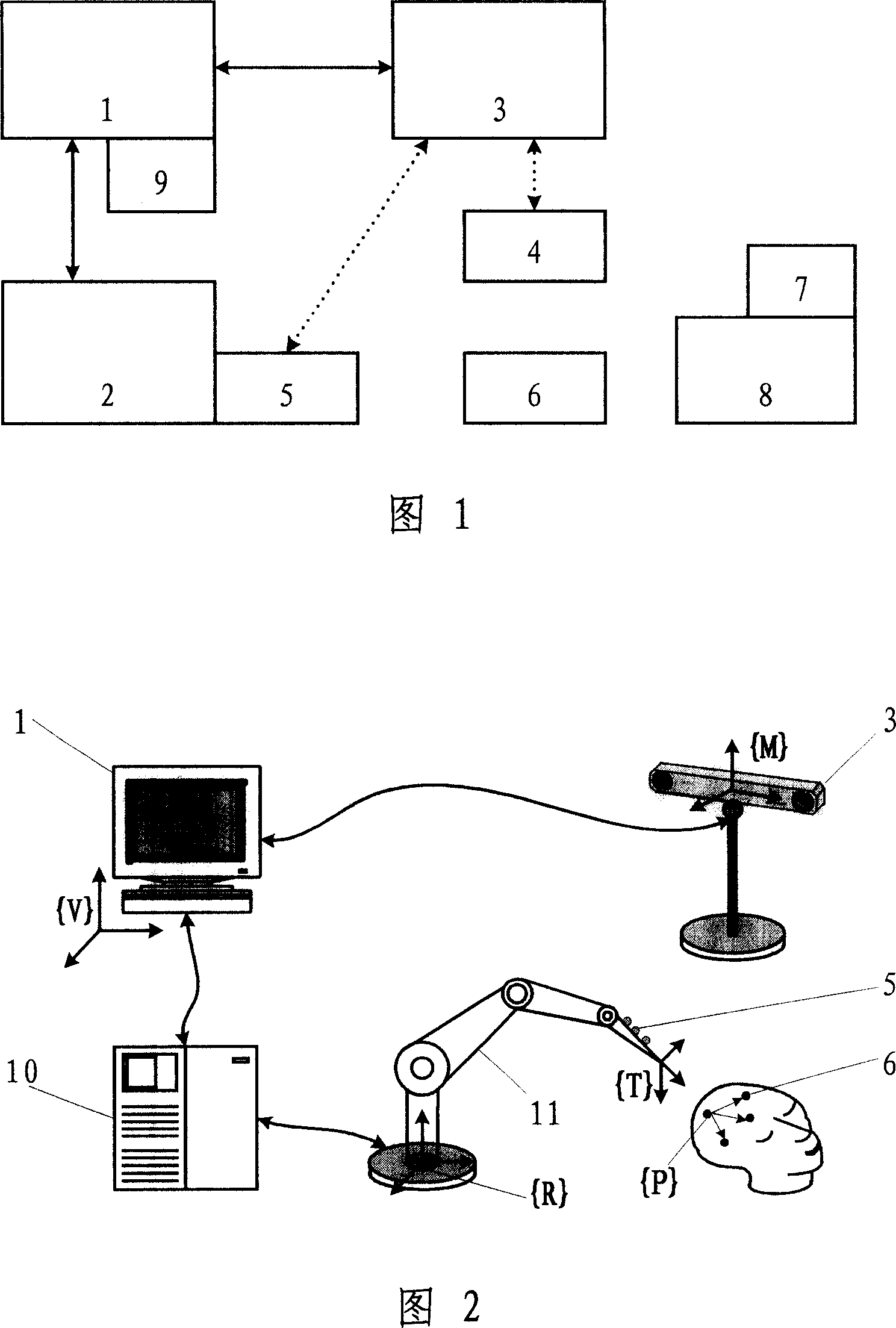
[0096] As shown in the figure, the equipment composition and the meanings of the labels in the figure are that it is composed of a computer 1, a five-degree-of-freedom robot 2, an optical tracking device 3, an optical registration tool 4, a passive marker 5, a medical marker 6, a shaping Pillow 7, operating bed 8 hardware parts, and auxiliary surgery planning and guidance software 9 parts, as well as a five-degree-of-freedom robotic arm 11 and a robotic arm controller 10.
[0097] The computer 1, the five-degree-of-freedom robot 2, the optical tracking device 3, and the passive marker 5 constitute a closed-loop robot pose measurement and real-time feedback control system, and the passive marker 5 is installed at the end of the five-degree-of-freedom robot 2 , is always tracked by the optical tracking device 3; said five-degree-of-freedom robot 2 includes a five-degree-of-freedom robot...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More