Software controller for handling system
a software controller and handling system technology, applied in the field of semiconductor manufacturing, can solve the problems of large space occupation, linear tools, cluster tools, etc., and achieve the effect of dampening the vibration of the robotic arm facility and reducing the resonant vibration of the end effector
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Benefits of technology
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
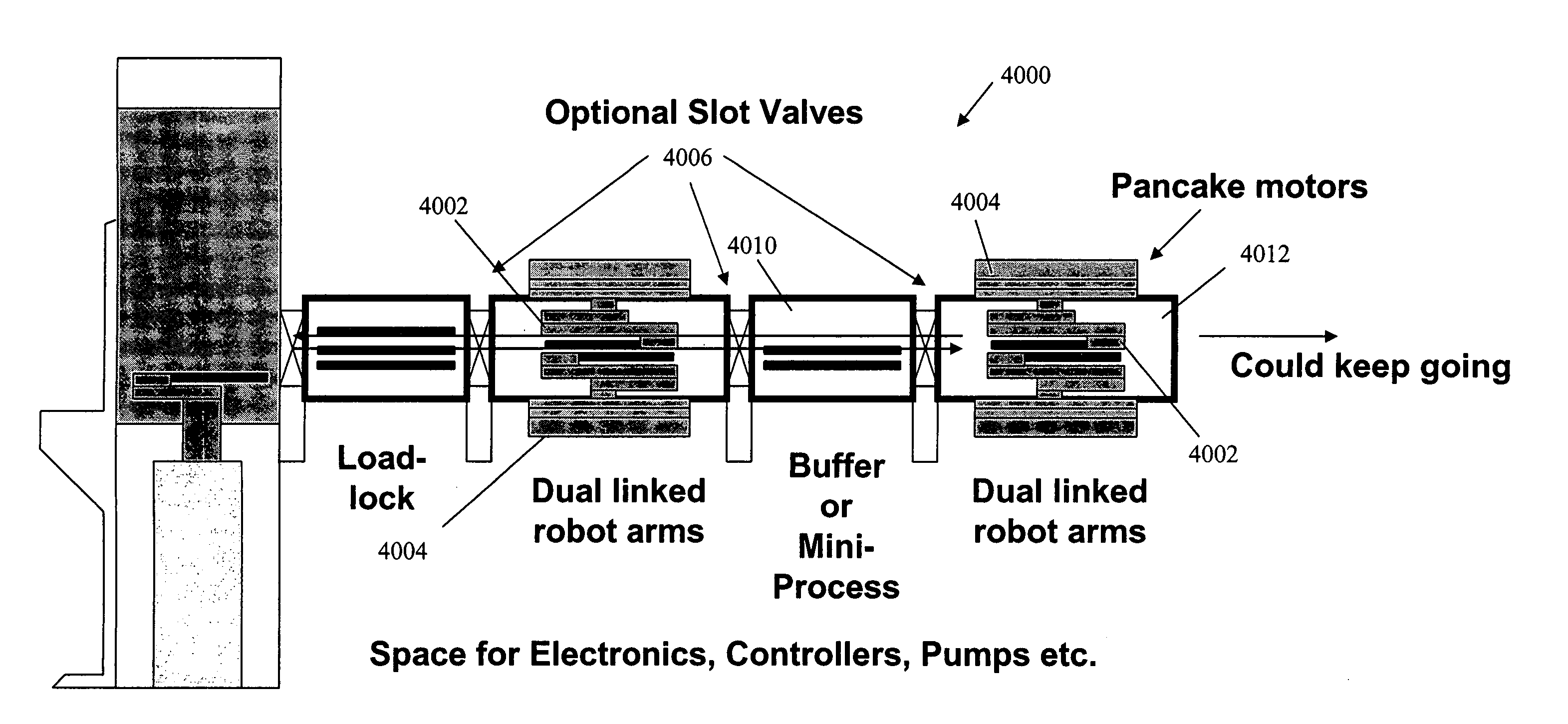
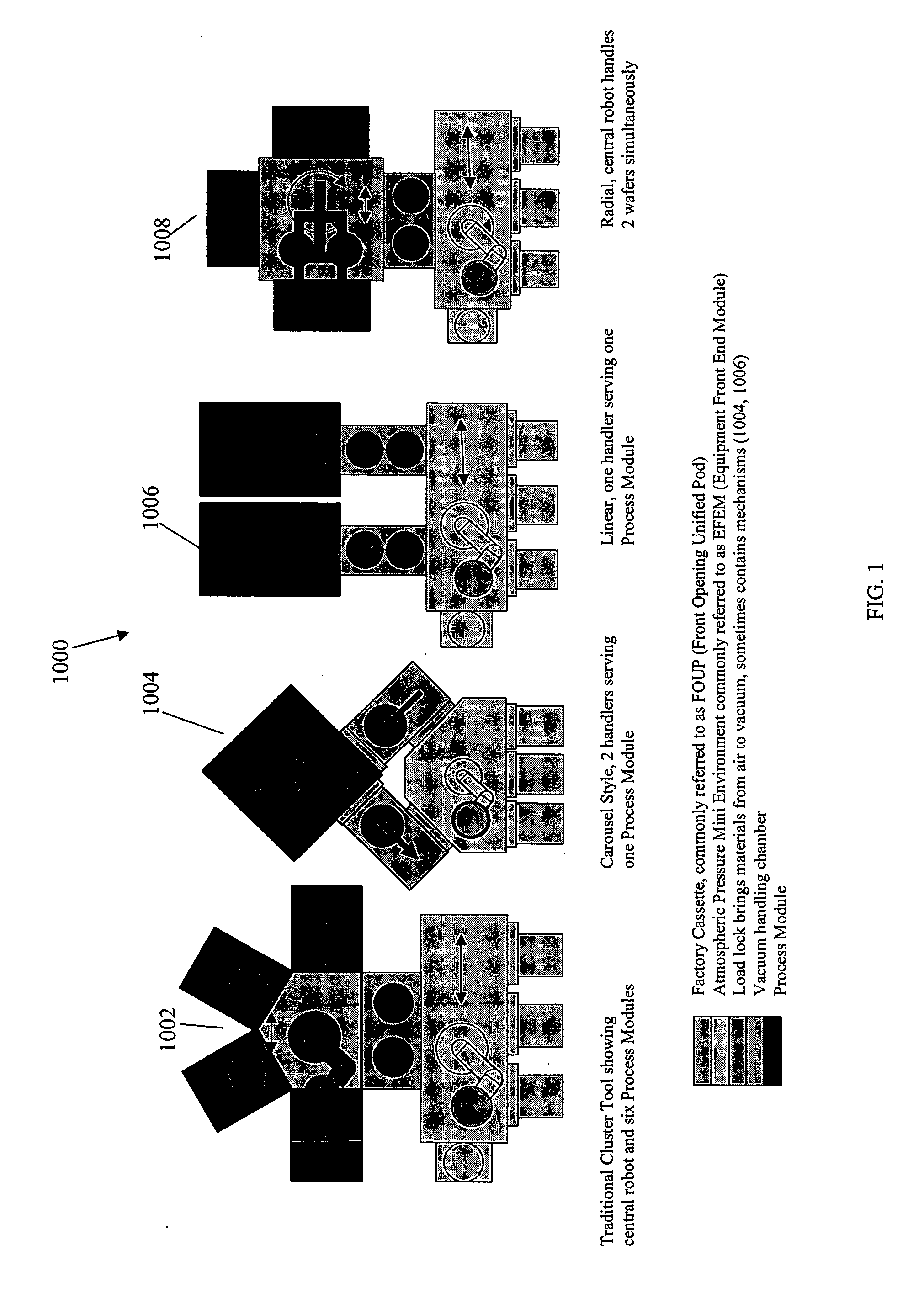
[0167]FIG. 1 shows equipment architectures 1000 for a variety of manufacturing equipment types. Each type of manufacturing equipment handles items, such as semiconductor wafers, between various processes, such as chemical vapor deposition processes, etching processes, and the like. As semiconductor manufacturing processes are typically extremely sensitive to contaminants, such as particulates and volatile organic compounds, the processes typically take place in a vacuum environment, in one or more process modules that are devoted to specific processes. Semiconductor wafers are moved by a handling system among the various processes to produce the end product, such as a chip. Various configurations 1000 exist for handling systems. A prevalent system is a cluster tool 1002, where process modules are positioned radially around a central handling system, such as a robotic arm. In other embodiments, a handling system can rotate items horizontally, such as in the embodiment 1004. An import...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com