

Method for controlling attitude of aircraft based on L1 adaptive control
An adaptive controller and adaptive control technology, applied in attitude control and other directions, can solve problems such as the influence of control effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
example 1
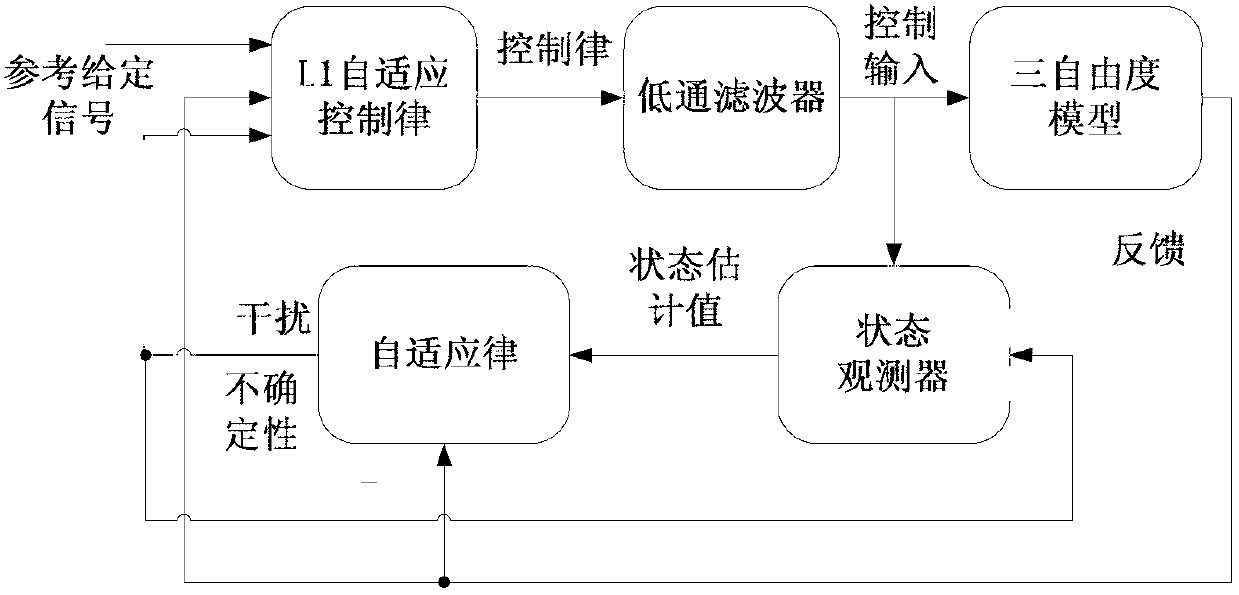
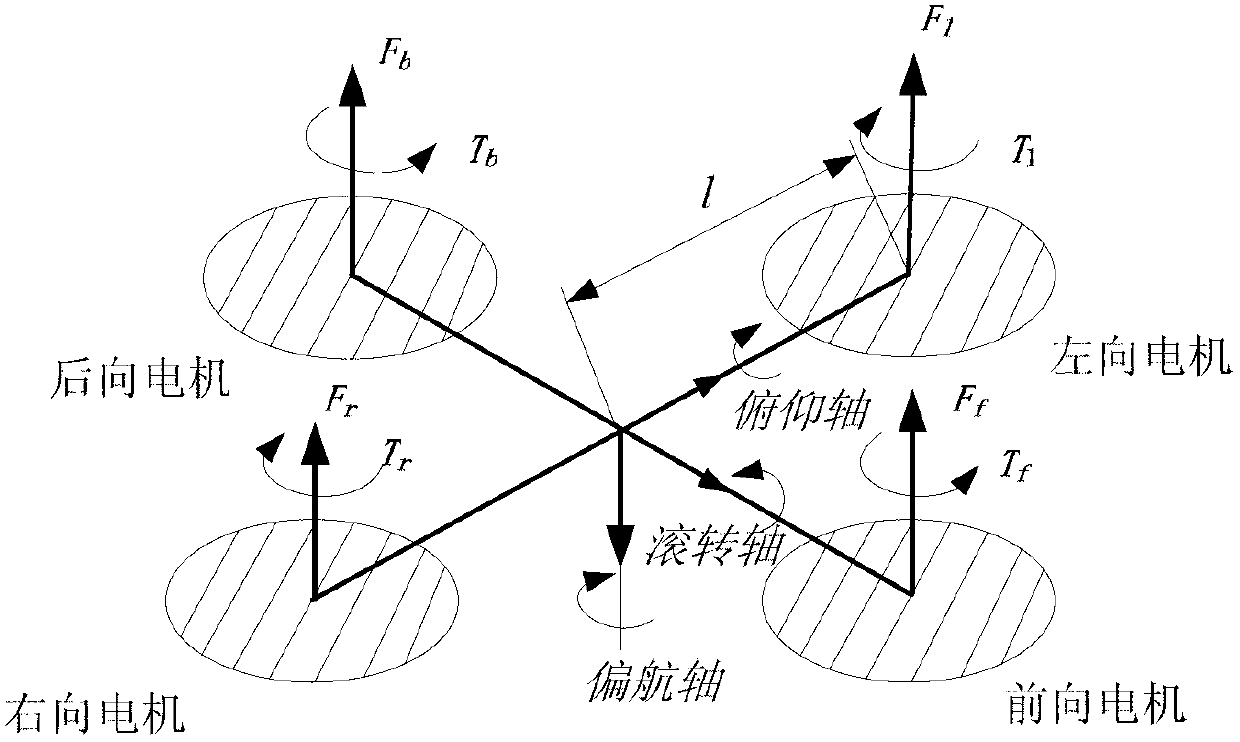
[0054] Example 1: The L1 adaptive attitude control method designed in the present invention is verified by the four-rotor suspension control platform of Quanser. Such as image 3 As shown, the speed difference between the forward motor and the backward motor in the quadrotor system will drive the quadrotor system to make a pitch motion around the pitch axis; the speed difference between the left motor and the right motor will drive the quadrotor system to move around the roll axis. Rolling attitude movement; the front and rear motors rotate in reverse, and the left and right motors rotate forward. When the torque generated by the two pairs of motors is unbalanced, the quadrotor system will have yaw motion. In short, the entire system adjusts the attitude of the system by adjusting the input of the drive motors of the four propellers and changing the speed of the four propellers to change the force and torque on the system. The closed-loop structure frame of the whole system ...
example 2
[0071] Example 2: The structure of the hardware part of the control system is as follows: Figure 7 shown. Among them, the main controller 1 adopts ATmega2560 of AVR, which has higher cost performance and is easier to design in the motor control part. The attitude information of the quadrotor is realized by the inertial measurement unit, the gyroscope 11 adopts the gyroscope IDG500 and ISZ500, the accelerometer 10 adopts the ADXL335, and the three-axis angular velocity value and the three-axis angular acceleration value measured by the gyroscope and the accelerometer are transmitted through the analog-to-digital converter 9. Give the main controller 1, and finally give the current attitude of the quadrotor through attitude calculation. The control signal of the remote controller 4 is sent to the PPM decoder 2 through the receiver 5 of 8 channels, and the remote controller signal and the autopilot signal are selected through the multiplexer 3, and the selection control signal ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More