

Robot single joint hydraulic pressure and position control test platform
A single-joint, hydraulic pressure technology, applied in the direction of electrical testing/monitoring, etc., can solve the problems of single-joint hydraulic pressure and position control of robots that have not been seen, and achieve the effect of simple structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] The present invention will be further described below with reference to the drawings and embodiments.
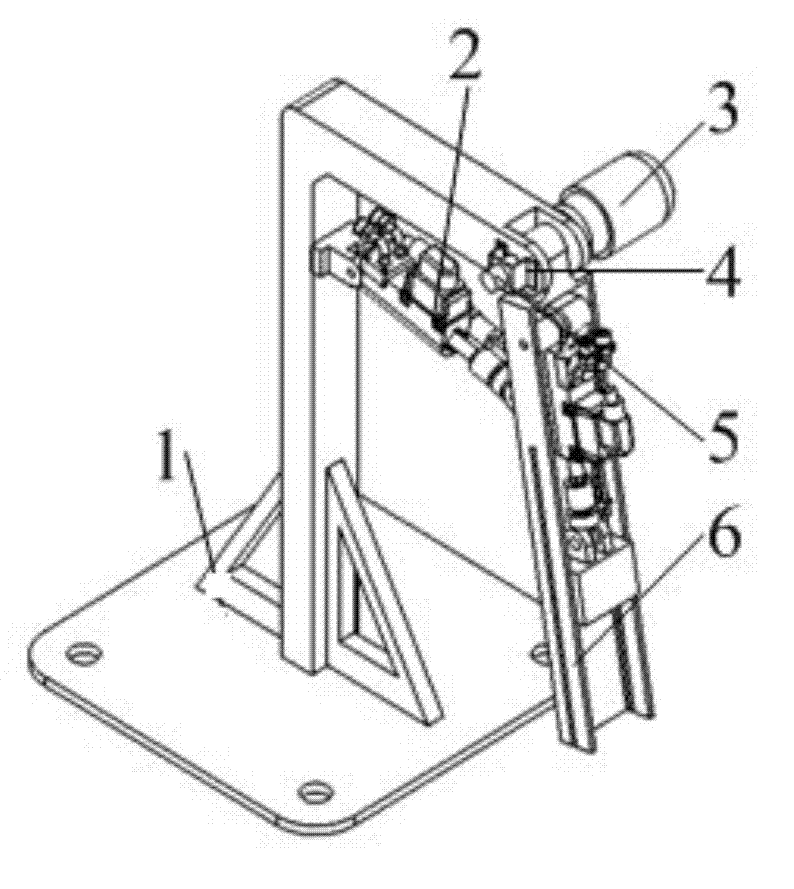
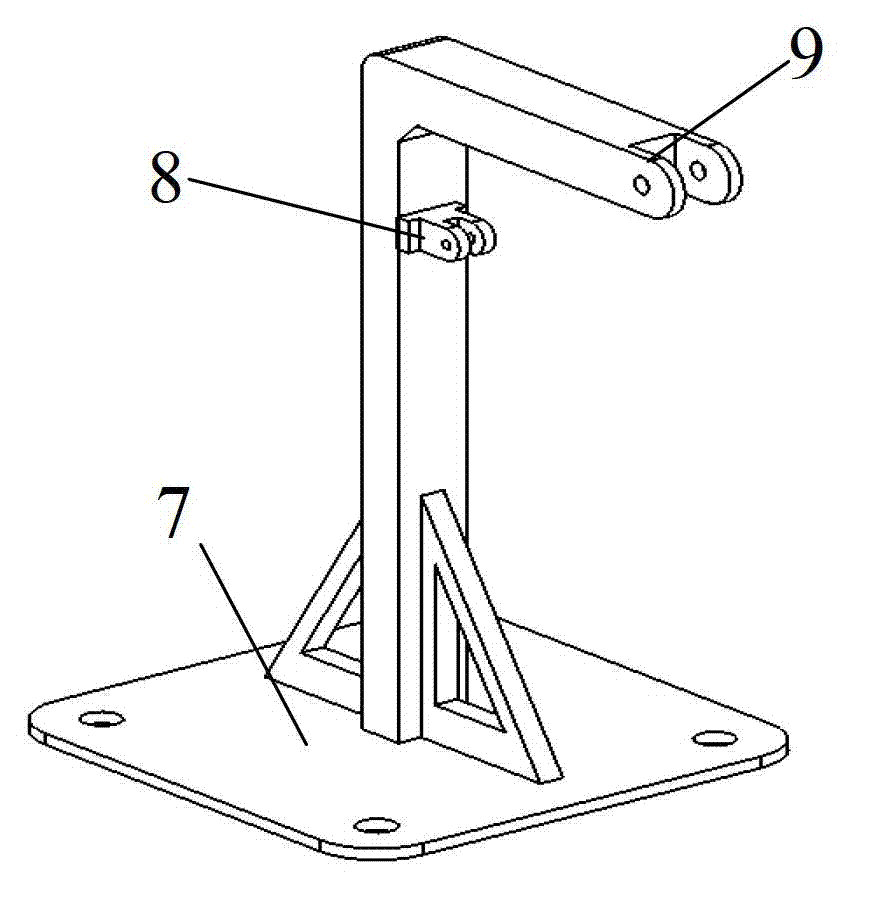
[0022] Such as figure 1 , 2 As shown, a robot single joint fluid pressure and position control test platform includes a cantilever support 1, a first hydraulic servo drive unit 2, a torque motor and a supporting controller 3, an angular displacement sensor bracket 4, and an angular displacement sensor 5. A swing unit 6, a number of sleeves 14 with the same inner diameter and different lengths, the torque motor comes with a flange, the cantilever support 1 includes a cantilever support base 7, a cantilever support lug 8, and a cantilever end 9 . Such as Figure 4 As shown, the hydraulic servo drive unit includes a hydraulic cylinder 22, a piston rod 19, an electro-hydraulic servo valve 21, a linear displacement sensor 20, and a force sensor 18.
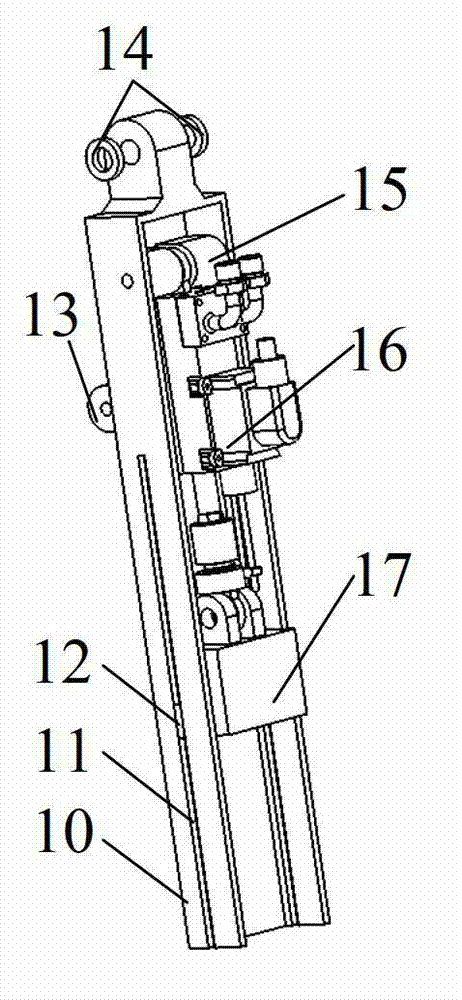
[0023] Such as image 3 As shown, the swing unit 6 includes a swing rod 10 (the two walls of the swing rod are provided with sw...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More