

Mixed type underwater navigation detector
A technology for underwater navigation and detectors, which is applied to underwater ships, underwater operating equipment, ships, etc. It can solve the problem of limiting the continuous working ability and application range of aircraft, increasing the risk of aircraft loss, and not being able to automatically recharge and battery life, etc. problem, to achieve the effect of increasing continuous working capacity, simple structure and compact structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] Further illustrate the present invention below in conjunction with accompanying drawing.
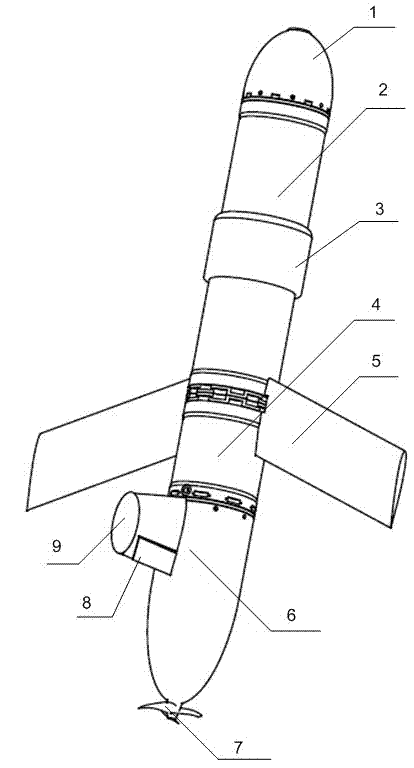
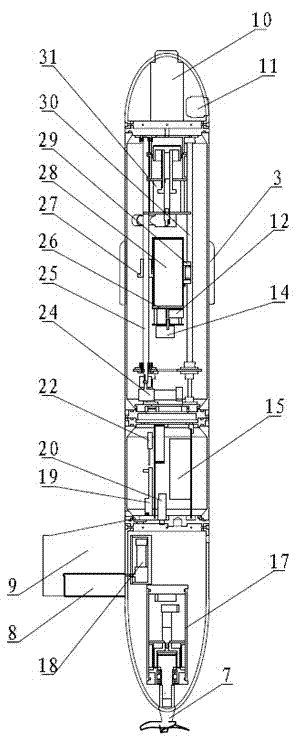
[0025] refer to figure 1 , figure 2 , image 3 with Figure 4 , the hybrid underwater navigation detector of the present invention comprises a fore cabin 1, a main cabin 2, an electronic control cabin 4 and a stern cabin 6 connected successively by a coaxial line, the fore cabin 1 and the stern cabin 6 communicate with the external waters, and the main cabin 2 and the electronic control cabin 4 are airtight cabins; a sonar altimeter 11 and an acoustic transceiver 10 are housed in the bow cabin 1;
[0026] The main cabin 2 is covered with a non-contact power and signal transmission component 3, and the non-contact power and signal transmission component 3 is equipped with an electromagnetic coupling coil, and is filled with insulating oil to achieve a balanced internal and external pressure seal; in the hybrid underwater vehicle and After the underwater connection platform is ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More