

Coordination and cooperation control method for football robots and system thereof
A soccer robot and control method technology, applied in the field of soccer robot coordination and cooperative control, can solve problems such as missed scoring opportunities, unseen cases of soccer robot adversarial game coordination and cooperative control, soccer robot autorotation, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
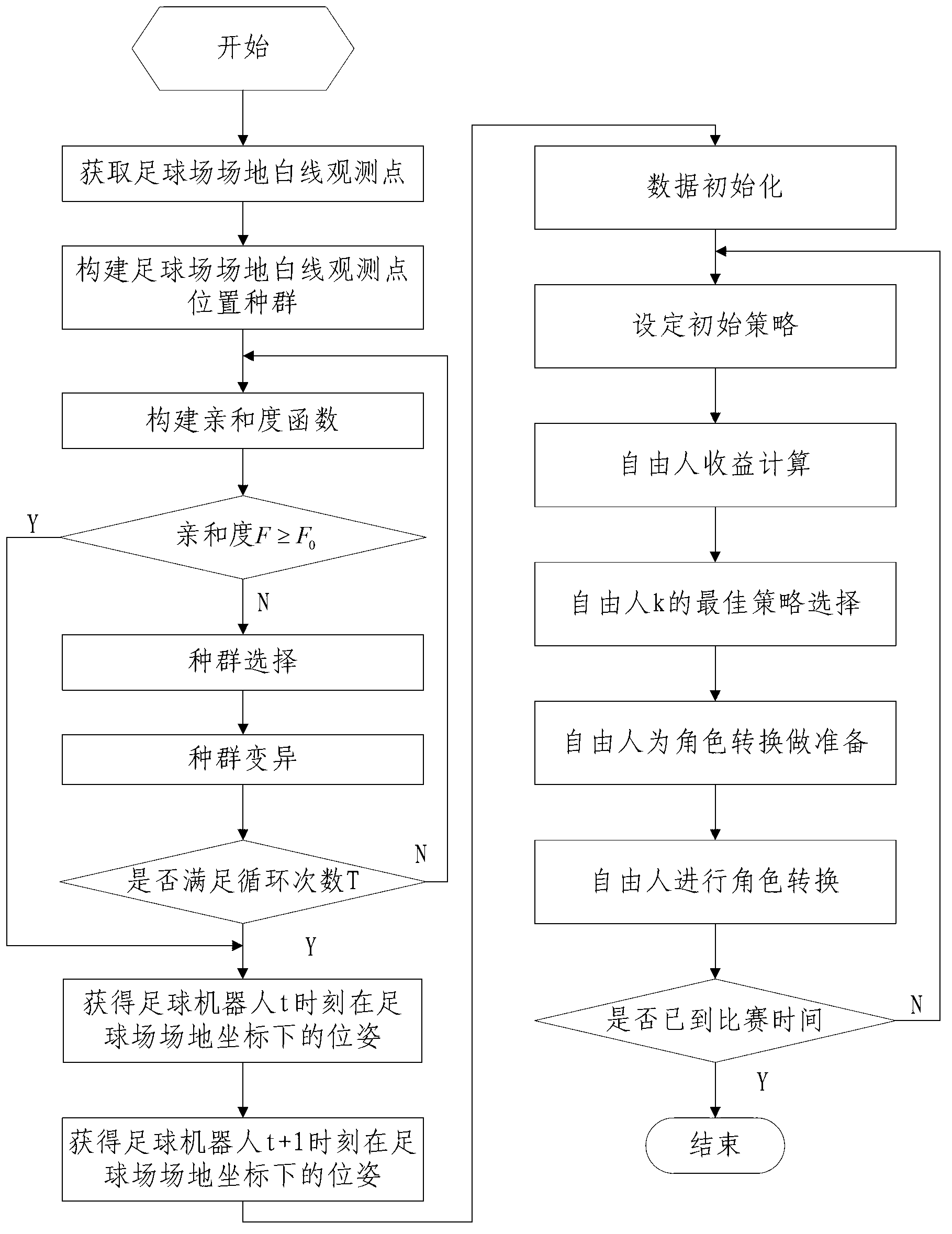
[0092] Such as figure 1 Shown a kind of football robot coordination and cooperation control method, comprises the following steps:
[0093] Step 1. The soccer robot performs self-positioning according to the quantum immune algorithm. The specific process is as follows:
[0094] Step 101, Obtain the observation point of the white line of the football field: use the omnidirectional vision module 5 to collect the white line image on the football field where the soccer robot is located in real time, and transmit the collected white line image of the football field to the data base synchronously Processor 1, data processor 1 analyzes and processes the white line image of the football field it receives, obtains the coordinate data of each pixel of the white line image of the football field under the coordinates of the football field, and observes it with multiple white lines point (x i ,y i ) is stored in the data memory 2; where, x i is the abscissa of the observation point of ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More