Aided design method for effectiveness evaluation of space manipulator air-floating ground simulation system
A space manipulator, air-floating simulation technology, applied in the field of measurement
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
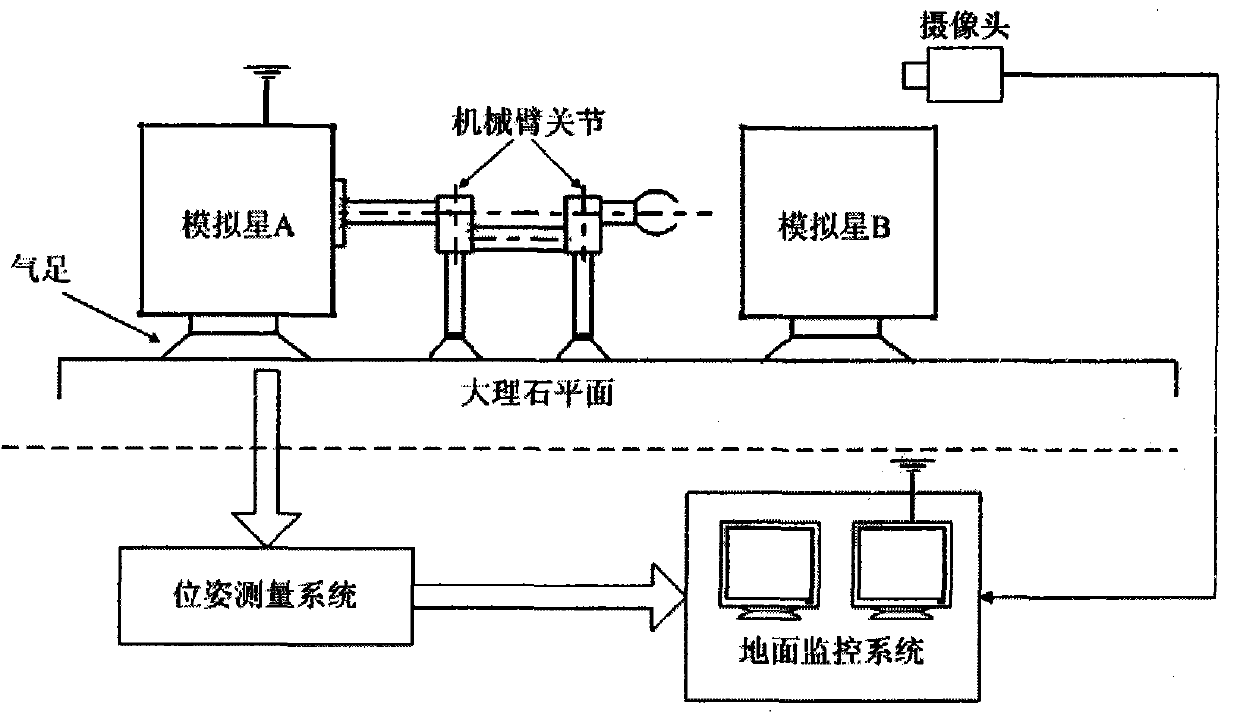
[0030] against figure 1 The schematic diagram of the air-flotation simulation system of the space manipulator shown in the present invention is an auxiliary design method for the performance evaluation of the air-flotation ground simulation system of the space manipulator, which is realized by the following aspects: (2) In the case of the introduction of air foot, analyze the influence of air foot on the effectiveness of algorithm simulation.
[0031] The specific evaluation steps are as follows:
[0032] Step 1: Give the parameters of the friction force and moment of the air-floating simulation equipment, and determine the critical value α of the inclination angle of the air-floating platform accordingly m =arcsin(3f s / Mg)≈3f s / Mg, where f s is the maximum static friction force, Mg is the weight of the air bearing table;
[0033] Step 2: Use simulation software, usually using matlab, to perform numerical simulation of the dynamics of the manipulator system in the actua...
Embodiment 2
[0046] to combine figure 1 , the index requirement of the inclination angle of the air flotation platform analyzed in the present invention is calculated as follows: according to experience, set the parameters of the air flotation friction force and moment, and the air flotation friction force is represented by static friction+Coulomb+viscosity+Stribeck friction, which needs to be set The given parameters include the Coulomb friction force f c , the viscosity coefficient f v , the maximum static friction force f s , Stribeck velocity v s , empirical constant δ, friction torque constant M ds , the range of random noise w(t), then the critical value of the inclination angle of the air bearing platform can be calculated as α m =arcsin(3f s / Mg)≈3f s / Mg. Therefore, the inclination angle index of the air bearing table should be less than α during design m . Assumed maximum static friction force f s is 0.008N, and the mass of the simulation equipment is 425Kg, then the cr...
Embodiment 3
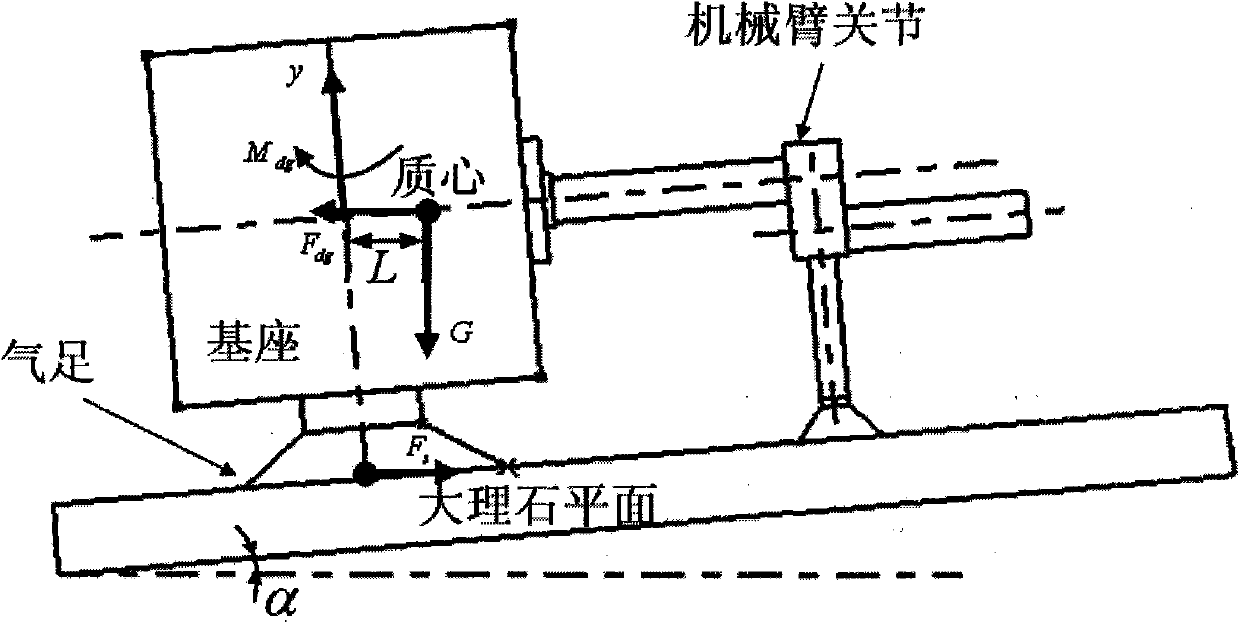
[0049] to combine figure 2 , Table 1, the present invention passes through the dynamics model of the space manipulator proposed in the literature "Space 3R Robot Workspace Analysis" (Journal of Astronautics, Volume 28, No. 5, 1390-1393 pages) by Xu Wenfu et al., and this The improved dynamic model of introduced air-floating friction and air-floating table tilt after the invention is expressed as:
[0050] H b H bm H bm T H m x b · ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More