

GPS weak signal tracking system based on I/Q branch correlation integral observation filtering
A correlation integration and tracking system technology, applied in the field of GPS signal tracking, can solve the problems of large tracking error and inability to effectively track weak signals, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0055] The present invention will be described in further detail below in conjunction with the accompanying drawings.
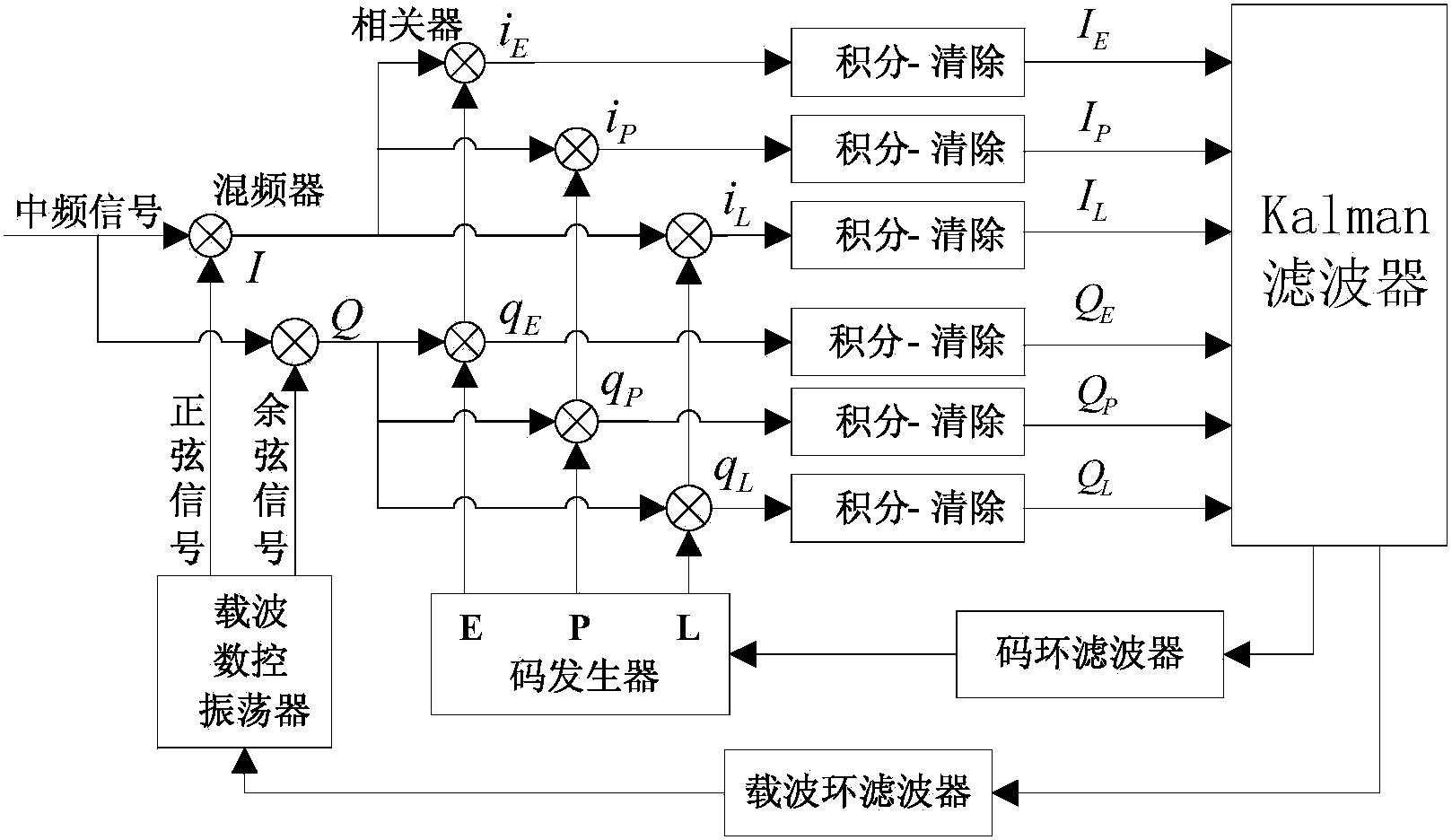
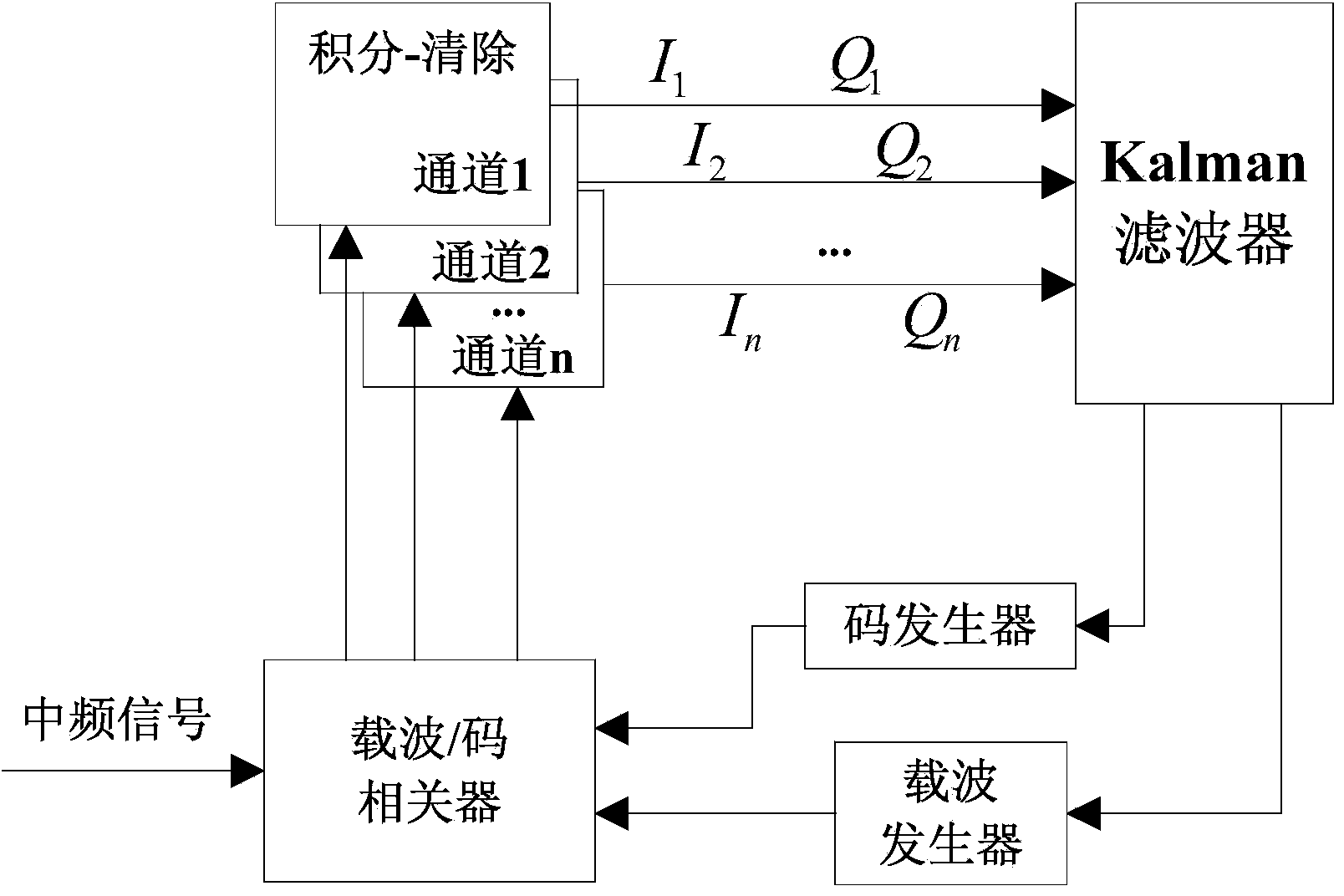
[0056]The core technology of GPS signal tracking based on I / Q branch correlation integral observation filtering is to use the I / Q branch correlation integral to construct a centralized filtering model and apply the UKF filtering algorithm. The basic idea is that the receiver tracks the loop I / Q The branch correlation integral value is used as the observation quantity, the centralized filter is used to replace the discriminator in the traditional GPS tracking loop, and the UKF filter algorithm is used to jointly estimate the characteristic quantities in the carrier loop and the code loop, so as to achieve the accuracy of carrier frequency, carrier phase and Accurate tracking of parameters such as code phase. Since there is a nonlinear relationship between the correlation integral value of the I / Q branch of the receiver and the state quantity in the centralized...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More