

The method of identifying and locating the starting point of fillet weld based on ultrasonic sensor
A starting point and sensor technology, applied in the field of automation, can solve the problems of low welding efficiency, inaccurate starting point positioning, clamping error, etc., to reduce labor intensity, improve welding quality and welding efficiency, and achieve high ranging resolution. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
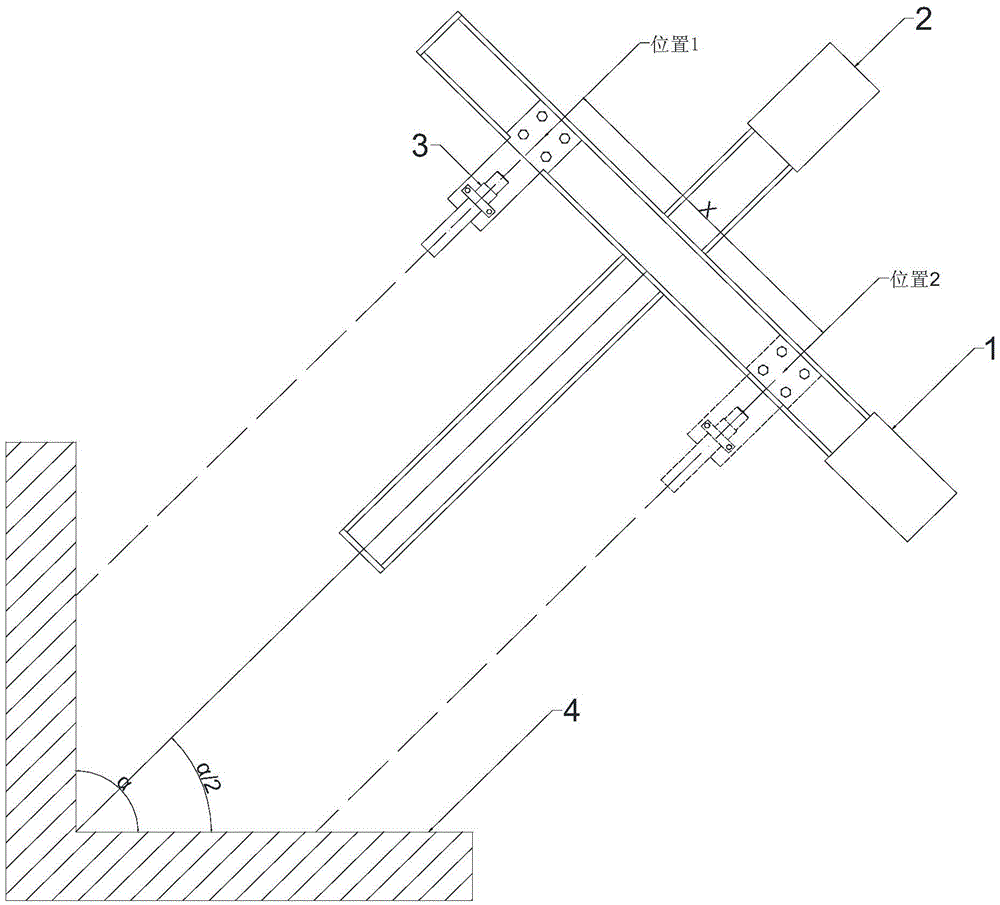
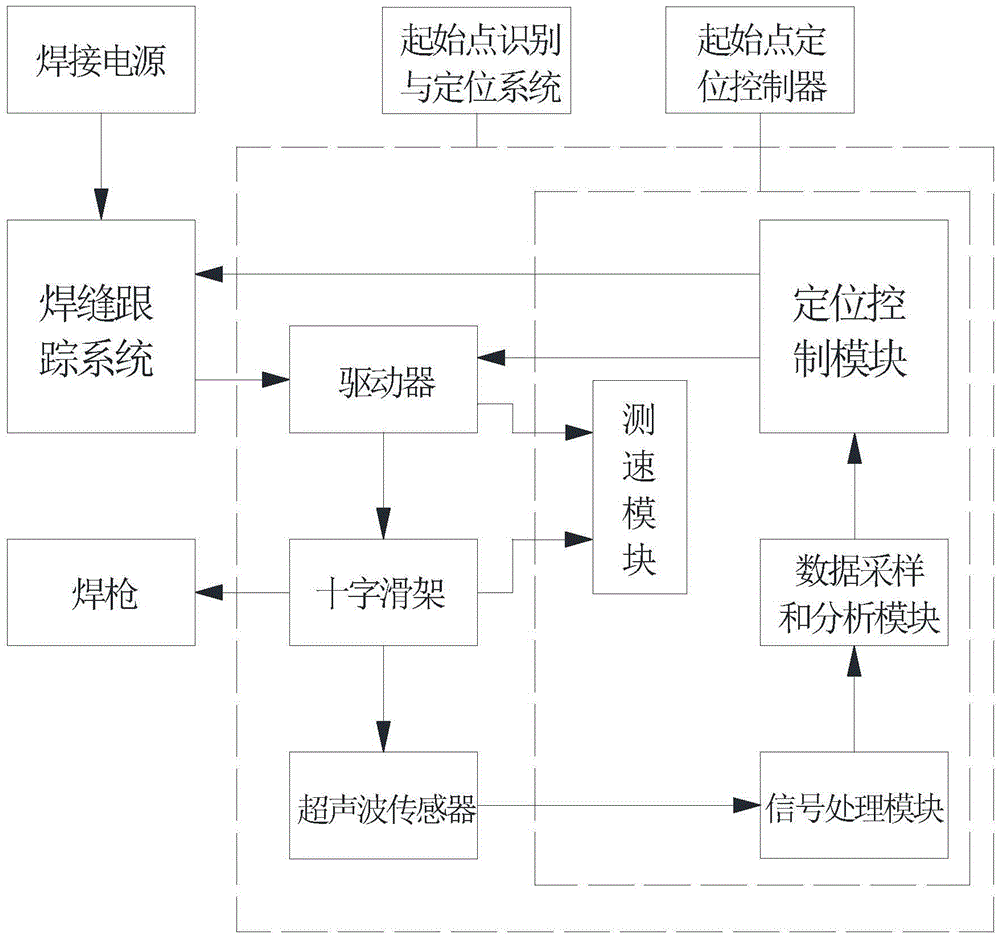
[0015] Embodiment 1 The method of the present invention based on the identification and positioning of the starting point of the fillet weld of the ultrasonic sensor is as follows: image 3 and Figure 4 As shown, it includes ultrasonic sensor 3, starting point recognition and positioning controller, driver, cross carriage (including horizontal carriage 1 and longitudinal carriage 2), among which cross carriage (including transverse carriage 1 and longitudinal carriage 2) with the workpiece mounted in a manner such as image 3 and Figure 4 As shown, the ultrasonic sensor 3 is rigidly fixed on the transverse carriage 1 and is in the same plane as the welding torch. The initial position recognition includes two parts: horizontal recognition and vertical recognition. For horizontal recognition, the motion model is as follows figure 2 As shown, the ultrasonic sensor 3 is driven by the horizontal carriage 1 to scan the position, the ultrasonic sensor 3 measures the distance a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More